
这些坚固、高密度且可扩展的多排BTB连接器适合多种应用,其中最突出的是电动汽车,尤其是用于电动助力转向(EPS)和电子控制单元(ECU)功能。

Ke教授表示:“你无法避免氧化,所以研究人员试图利用它,把它变成新的强化机制,从而使材料更坚固。这将是一件令人惊叹的事情。”

此次提供的“Ford Pro家庭充电(Ford Pro Home Charging)”专门针对那些既没有中央车辆仓库,也没有雇用全职车队经理的公司,驾驶员可以在轮班期间在家中使用联网的Ford Pro家庭充电器(Ford Pro Home Charger)为电动货车充电。
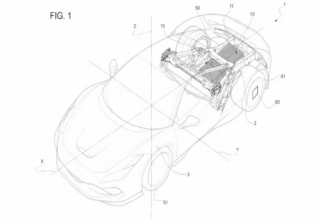
将电池堆向上倾斜并远离汽车中部,从而将电池堆底座用作空气动力装置,进而可以实现空气动力学优势。

布伦瑞克工业大学(Technical University of Braunschweig)和集成基础设施解决方案公司INTIS GmbH的研究团队开发出电动汽车固定感应充电系统,充电容量为22 kW。
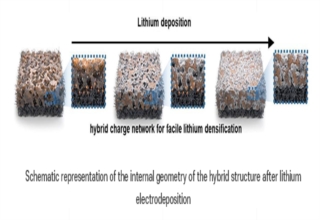
实验表明,采用这种三维结构的锂金属阳极电池具有344Wh/kg的高能量密度(能量与电池总重量之比),并且在超过200次充放电循环后表现出优异的稳定性。

这些原型基于Smoltek独特的、受专利保护的碳纳米技术,旨在是将电解槽阳极中的铱负载量减少95%(相当于0.1毫克铱/平方厘米),而当前商用材料需使用2.0毫克铱/平方厘米。

ampliTex天然纤维既提供结构层,又提供视觉表面,从而实现优雅自然的外观和更高水平的舒适度。
美国能源部劳伦斯伯克利国家实验室(Berkeley Lab)的研究人员发现了一种可以在室温和常压下生产氨的新方法。
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921












