盖世汽车讯 据外媒报道,昆士兰科技大学(QUT)的研究团队从昆虫和动物的大脑中获得灵感,发明了更具能效的机器人导航。
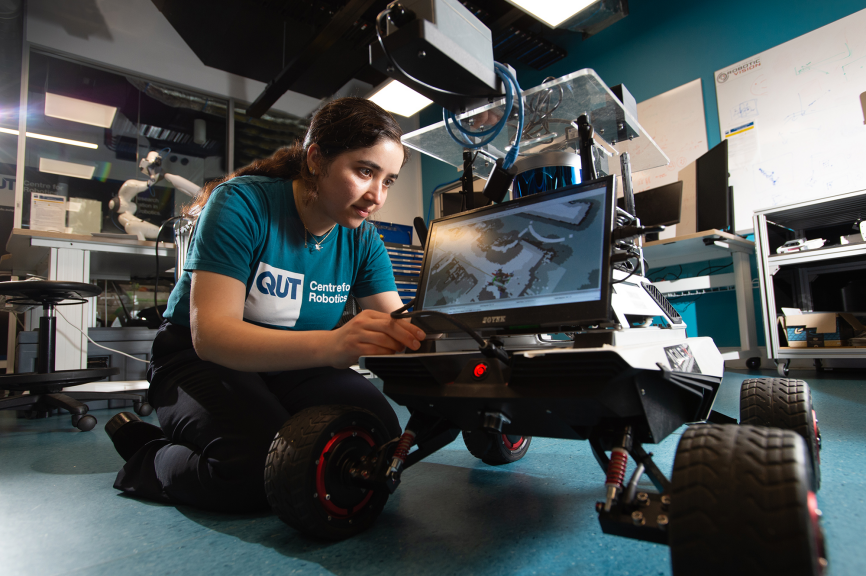
(图片来源:昆士兰科技大学)
这项研究由博士后研究员Somayeh Hussaini、QUT机器人中心Michael Milford教授和Tobias Fischer博士领导,并得到芯片制造商英特尔(Intel)的支持,提出了一种使用尖峰神经网络(SNN)的新型位置识别算法。
Hussaini表示:“SNN是人工神经网络,可以模仿生物大脑如何使用简短、离散的信号来处理信息,就像动物大脑中的神经元交流方式。这些网络特别适合神经形态硬件,即模仿生物神经系统的专用计算机硬件,能够加快处理速度,并大幅降低能耗。”
虽然近年来机器人技术发展迅速,但当代机器人在复杂、未知的环境中仍然难以导航和操作。它们还经常依赖于人工智能(AI)衍生导航系统,其训练方式(training regimes)需要进行大量的计算和能量。Fischer博士表示:“动物非常擅长跨越宽广的动态环境,并具有惊人的效率和稳健性。这项工作朝着实现生物学启发导航系统的目标迈出了一步,有朝一日可以媲美甚至超越目前更为传统的方法。”
该团队开发的系统使用小型神经网络模块,可以从图像中识别特定位置。这些模块被组合成一个整体(即一组多尖峰网络)以创建可扩展导航系统,能够学习在大型环境中导航。Milford教授表示:“使用一系列图像而不是单个图像,可使现场识别准确率提高41%。这使系统能够适应随时间推移(以及跨越不同季节和天气条件)而变化的外观。”
该系统在一个资源受限的机器人上成功地进行了演示,从而证明该方法在能源效率十分关键的现实场景中是可行的。Hussaini表示:“这项工作有助于为自主机器人提供更高效、更可靠的导航系统,以用于能源受限环境。尤其是在空间探索和灾害恢复等领域,优化能源效率和缩短响应时间十分重要。”

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202412/6I70412532C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921