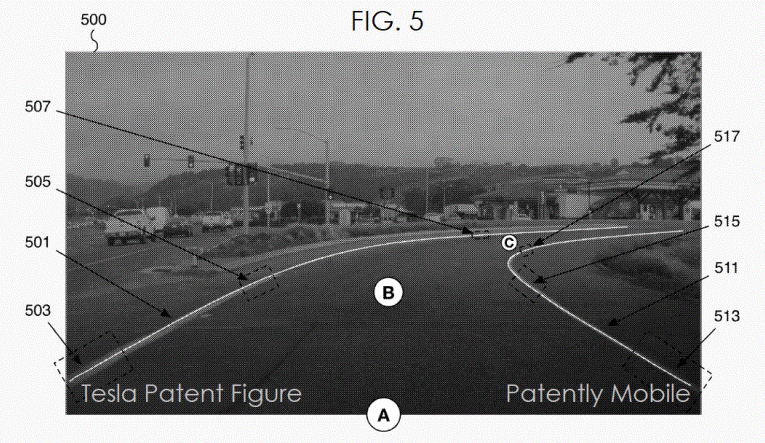
盖世汽车讯 据外媒报道,当地时间9月12日,美国专利局(U.S. Patent Office)公布了特斯拉的一项专利申请,名为“预测用于自动驾驶的三维特征”(Predicting Three-Dimensional Features for Autonomous Driving)。该专利包含一个与存储器耦合的处理器(AI处理器),经过配置,其可接收基于车辆摄像头捕捉到的图像的图像数据。之后,此类图像数据会被输入到一个训练有素的机器学习模型中,用于训练以预测机器学习特征的三维轨迹,然后再利用此类三维轨迹自动控制车辆。
在一些实施用例中,例如,下图5中显示的车道线等特征的三维表示,是通过与地面真值(ground truth)相对应的时间序列元素组创建的。然后,该地面真值会与时间序列元素的一个子集关联起来,例如捕获的图像数据组中的单个图像帧。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202409/25I70406113C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921