

在自动驾驶测试中,仿真测试因其效率、成本、安全性等方面的优势更受青睐,而仿真测试中需输入大量变量和交通元素形成交通仿真场景。PTV VISSIM软件提供交通流工具,可将这一工具与其他软件相结合进行自动驾驶开发,打造出符合真实世界的背景交通流。
2022年9月21日,由盖世汽车主办的2022第二届商用车自动驾驶大会上,霹图卫软件科技(上海)有限公司总经理沈畅介绍,PTV VISSIM作为微观的交通分析软件,在仿真运行时会分析关注到车辆具体的轨迹,并根据每个参与者复杂的移动模型来模拟交通流的模型,其中还包含了信号灯、停车标志等完整的交通控制元素。

沈畅 霹图卫软件科技(上海)有限公司总经理
以下为演讲内容整理:
使用PTV交通流软件进行AV、CAV测试的必要性
自动驾驶测试一般有三种测试方法,一是道路测试,二是封闭测试,三是仿真测试。前两种方法的缺点在于测试效率低、测试成本较高,且危险场景不可测。而仿真测试的测试较为快速,成本也较低,一些危险的工况也可进行测试。
自动驾驶测试分为几个阶段:基础场景、高级场景、交通状态、交通场景。从阶段2开始,在高级场景中需要有简单的交通流背景参与测试。从阶段3到阶段4,当开始测试算法、探索功能时,需要提供真实的交通行为以及仿真测试。从L2级别以上,就需要引入交通流仿真软件测试无人驾驶车辆的开发。
自动驾驶需要对非常多场景进行测试,在不同交通场景测试中需输入很多变量,包括大量交通元素、交通仿真场景等。如果都实地去做测试,将带来巨大成本。因此,高阶段测试需要交通流软件。
PTV VISSIM软件提供交通流工具,由我们的软件来提供一个符合真实世界的背景交通流,来帮助客户做自动驾驶的测试开发。
关于PTV集团
PTV集团提供最先进的软件解决方案,旨在增强运输和流动性,实现更清洁、更智能的未来。我们总部在德国,在全球有二十八家子公司,有超过2500个城市使用到我们的软件。我们在移动和运输方面拥有超过四十年的软件经验,客户遍布一百二十多个国家。
在中国团队的努力下,目前我们的产品已覆盖中国所有省份,在中国90多个城市有超过600个用户。我们的主要舞台在交通圈,车企相当于跨界舞台。我们有战略规划、战术、运营管理等一系列软件,能为车企朋友提供宏观、中观、微观层面的解决方案。

图片来源:霹图卫
PTV VISSIM软件简介

图片来源:霹图卫
什么是PTV VISSIM软件?首先从这张图中可以看到,我们研究多种出行方式交通流仿真,包括行人、轨道交通、公共汽车、小汽车、货车、自行车等等都包含在软件系统中。
作为一个微观的交通分析软件,PTV VISSIM在仿真运行时会分析关注到一辆车具体的轨迹,另外这个交通流的模型是根据每个参与者复杂的移动模型来模拟的,并根据路径信息自动进行运行。这一交通流模型软件中还包含了信号灯、限速标志、停车标志等完整的交通控制元素,能提供符合真实交通世界的交通流表述,方便用户进行分析。

图片来源:霹图卫
针对车企的需求,我们可随机模拟驾驶员失误的交通场景。例如在对速度误判,闯了红灯或闯了倒三角标志的交通流状况下,自动驾驶车辆产生有什么样的反应。我们在不同路段上设置随机概率,通过软件随机发生的方式,能为车企的测试提供更加丰富的危险场景。
软件的背后由模型理论去支持。这些模型包括跟车模型,车和车之间如果太近会刹车,太远了会加速跟进;还有换道模型,对应的车辆在一定车速下碰到合适的时机会换道;还有机动车和非机动车混行的模型。

图片来源:霹图卫
上面的传统场景中, 车辆的速度、轨迹等是由事先人为写好的,但这种场景无法展示并线车辆的交互。下面是通过我们软件生成的场景,车辆和车辆之间具有相互作用,例如突然变道会导致后面的黄车主动刹车,当发现距离很近又会继续减速,调整跟车距离至一个安全的状态。通过这种方式,能演绎出车辆和车辆之间的交互作用。
除了Windows版本,PTV VISSIM也提供适用于LINUX的KERNEL版本,适用于大规模的计算要求,提供独立执行和共享库两个版本。
PTV VISSIM在自动驾驶、CAV中的应用
使用PTV VISSIM来模拟AV和CV的车辆有几种方法。首先是用自带的自动驾驶行为模型来模拟VISSIM自动驾驶测试,这种方式更偏向于交通客户,可直接调用默认模型修改参数。面向车企有三种更细的方法,第一种是利用外部驾驶员模型接口,即DriverModel.dll接口,将车企自己的驾驶的算法放在仿真环境里去做测试;第二种是通过COM接口完成V2X CAV的测试;第三种是驾驶模拟器接口,可以是真实物理世界的驾驶模拟器,或通过动力学软件、感知软件、通讯软件等软件进行联合仿真。
VISSIM自带自动驾驶编队功能,在车辆停靠和速度差达到一定距离的情况下会自动进行编队。头车速度起到影响作用,后车会以恒定的距离跟着头车,车之间的速度差为零。根据路径要求,目的地可以进行自动拆分。为了模拟自动驾驶的编队功能,我们也开发了新的特定车辆类别、特定车道等,可以根据车道来定义驾驶行为。
PTV VISSIM服务于所有交通流车辆,包括控制算法的车在内,每个仿真秒都会为一辆或几辆主车提供周围车辆的位置、速度、加速度、信号控制机等信息,并通过EDM接口给到算法。算法接收到周围车辆的情况后,会在下一个仿真秒对主车发出加速、减速或变道指令,并将执行信息再回传给VISSIM。再下一个仿真秒依次循环,每当主车的速度、加速度和位置更新,周围车辆也会进行更新,且信息会同步到算法。通过这种方式,可以在虚拟的交通环境中完成仿真算法的测试。
驾驶模拟器接口可以做软件和硬件的在环测试,其中与软件、硬件交换的是实际坐标位置,在路网中可以通过驾驶模拟器接口加入新车辆或者需测试的主车。通常情况下软件仿真频率是二十分之一秒,对于一些仿真频率更高的动力学软件,我们可以进行差值计算。如果做联合仿真,驾驶模拟器和PTV Vissim两边都要保存路网信息。
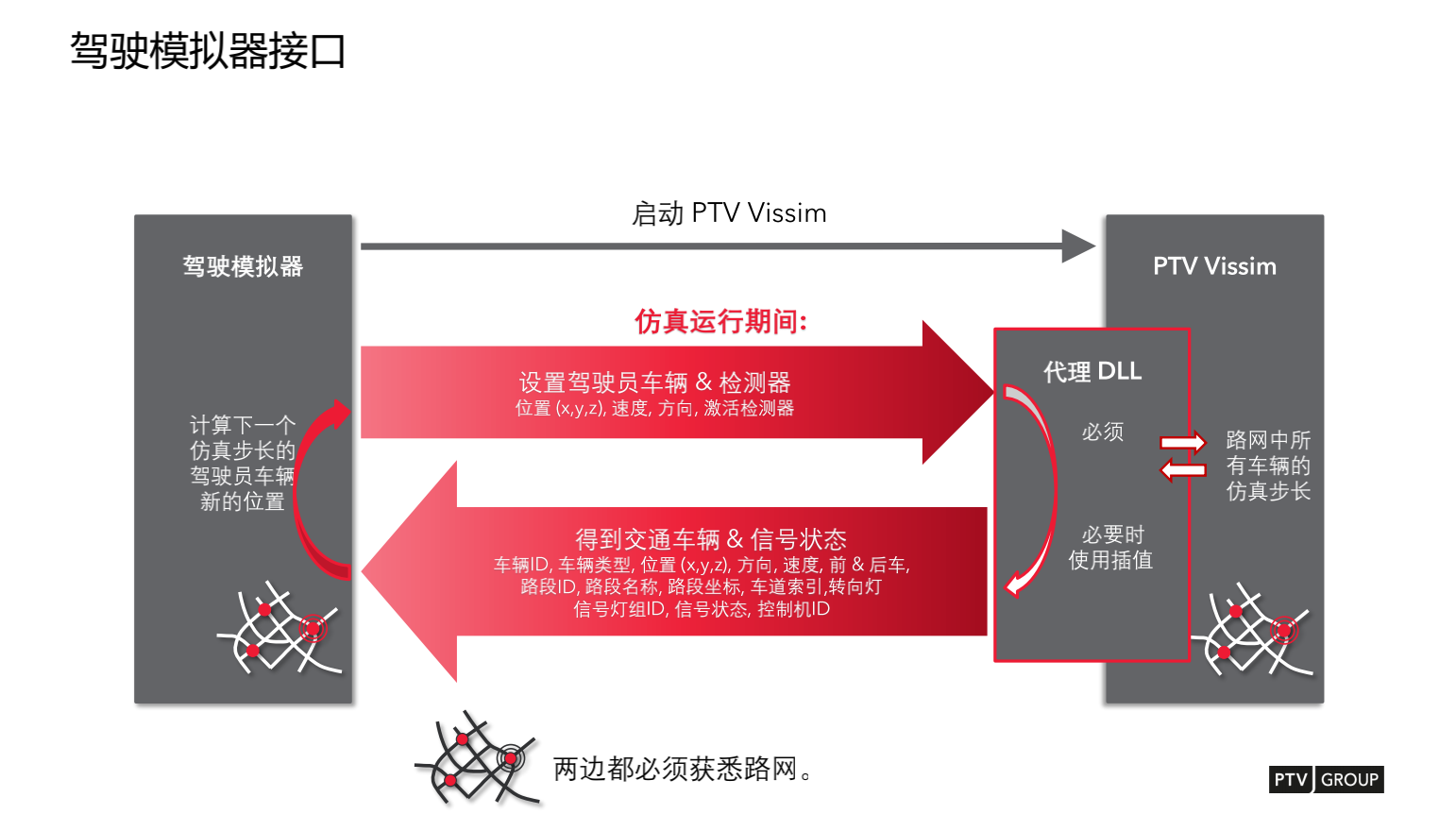
图片来源:霹图卫
驾驶模拟器接口左边可以连接驾驶模拟器或汽车的动力学软件和汽车感知软件,相当于将一辆车放到Vissim中,在仿真运行期间能得到交通周围环境的车辆状态、信号灯状态,包括车辆ID、车辆类型、位置、方向、速度、前后车、路段坐标、信号灯ID、信号灯状态等。将这些信息回传到驾驶模拟器或另外的汽车软件,便能支持后续的工作。
PTV Vissim的强项是做交通流,与车辆通信软件、调度软件、感知软件和汽车动力学软件组合在一起可以做联合仿真。我们可以和CarSim、Carmaker、PreScan、dSPACE、Carla等不同的汽车软件进行对接,把完整的交通场景呈现给客户,我们和合作伙伴的应用在东海大桥的自动驾驶车队上也得到了使用。
总结一下PTV Vissim在AV/CAV仿真应用上的优点。PTV Vissim能使用内部的成熟模型来真实地模拟出行方式的交通行为,具有可根据项目需求修改的自定义参数和车辆行为。具有简单灵活的目标决策功能,可以模拟随机驾驶员失误行为,自动创建大量连续场景,在仿真测试中提供有交互行为的车辆,通过自身的接口可以和其他软件进行联合仿真。基于真实的场景,可以在虚拟的环境中测试ADAS功能、CAV逻辑、动力总成技术等。我们的软件还可以用于外部的车辆控制,实现HIL、SIL、MIL方面的应用。
(以上内容来自霹图卫软件科技(上海)有限公司总经理沈畅于2022年9月21日由盖世汽车主办的2022第二届商用车自动驾驶大会发表的《商用车的高级别AV和CAV仿真测试需要交通流仿真的助力》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202210/12I70316952C106.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














