

2022年可以说是激光雷达“上车”的元年了,各家车企也都在拿新车型上搭载的激光雷达数量作为宣传卖点,你有1颗,那我就装2颗、3颗甚至4颗。相比之下,最早提出搭载激光雷达的蔚来ET7反倒显得有些“落后”了。不过虽然数量不多,但如果把ET7上的激光雷达单拎出来,实力绝对算得上是同级最强了!所以今天就来给大家一文讲透:蔚来ET7的激光雷达到底强在哪?

友情提示:本篇内容很长,干货很多,而且比较硬核,如果对技术讲解感到枯燥看不下去的话,在这里直接先给大家总结一下ET7激光雷达的亮点和优势。
1.全球首款量产的1550nm激光雷达;
2.最远探测距离可达500m,10%反射率下最远探测距离250m;
3.大气穿透能力强、探测精度更高;
4.拥有“定睛凝视”功能,可以实现0.06°*0.06°超高分辨率;
5.POD(探测概率)更高,感知250m处10%反射率物体的探测概率超过90%。
为什么需要激光雷达?
在自动驾驶感知方案中,毫米波雷达与摄像头的组合较为成熟,目前市面上绝大多数的新车都有装配。但随着道路状况越来越复杂,当前技术条件下,摄像头+毫米波雷达的方案在面对强光、隧道逆光、黑夜、未经算法训练的物体等场景下难以可靠识别障碍物。
此外,目前摄像头、甚至多目摄像头,配合视觉算法,依然较难提供自动驾驶感知层面至关重要的深度信息,目标物体越远,深度信息精度越低。

场景1:隧道强逆光

场景2:远距离小型障碍物

场景3:感知硬件上有污垢
通过以上的3个实际用车场景下激光雷达和摄像头的感知能力对比,我们不难看出目前摄像头、甚至多目摄像头,配合视觉算法,依然有着不小的局限性,同时也较难提供自动驾驶感知层面至关重要的深度信息,目标物体越远,深度信息精度越低。想要单纯依靠纯视觉方案实现量产车从驾驶辅助到自动驾驶的转变,其中的难度不亚于让你高考考满分。
所以在这种情况下,能极大提升车辆感知能力的激光雷达自然就被“请”上车了。
那么激光雷达到底是怎么工作的呢?
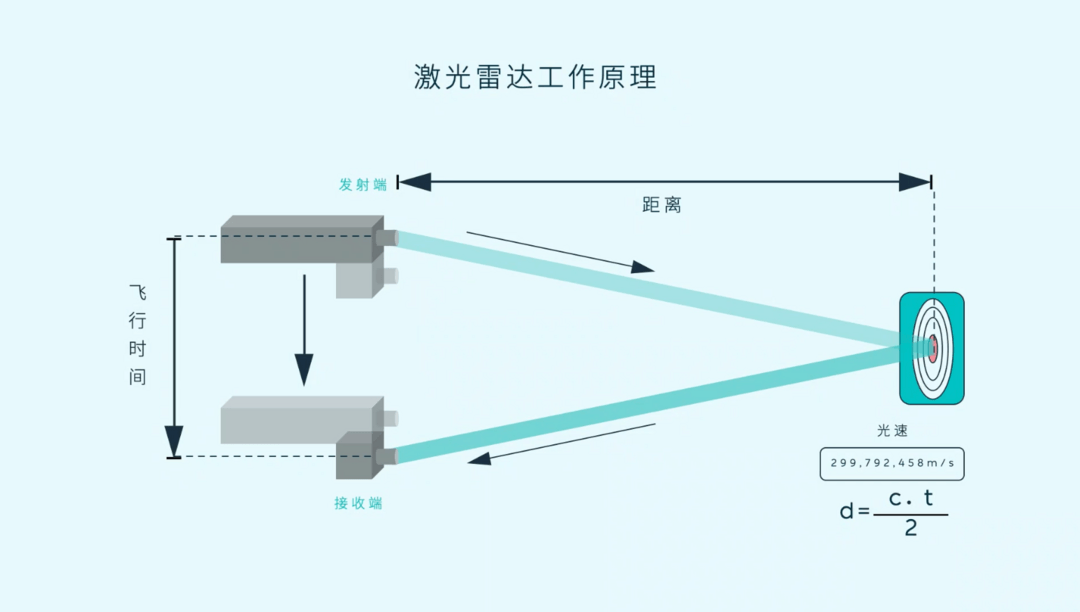
如今智能电动汽车上搭载的激光雷达,多为LiDAR(Light Detection And Ranging)它包括一个单束窄带激光器和一个接收系统。激光器产生并发射一束光脉冲,打在物体上并反射回来,最终被接收器所接收。接收器通过测量光脉冲从发射到被反射回的传播时间,计算出车辆与反射物之间的距离,从而输出车辆周边环境的三维空间数据。
激光雷达通过收集反射光脉冲,输出三维空间数据,并为视觉传感器提供可靠的深度信息。激光雷达加入后,整体传感器达到互为冗余,达到整车感知的升维,提升感知的可靠性。车辆可有效识别路面凸起、井盖缺失、抛洒物、大型静止障碍物等目前摄像头难以识别的目标。这对提升自动驾驶/自动辅助驾驶的安全性具有极大价值。
ET7的激光雷达,我愿称之为同级最强!
先声明一点:没有充值!没有充值!没有充值!所以“同级最强”的称号不违反广告法。(当然这也并不是什么广告)
至于为何敢称之为“同级最强”?先来看看“蔚小理”三家新产品上搭载的激光雷达以及极狐阿尔法S HI上华为的激光雷达参数对比。
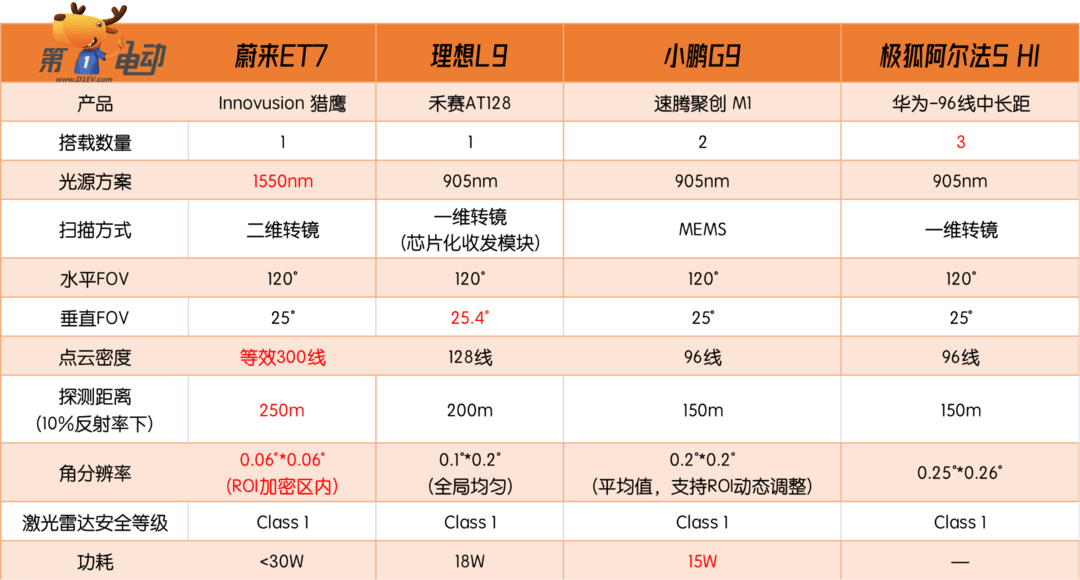
蔚来ET7搭载了来自Innovusion的超远距高精度激光雷达,最远探测距离达500米,10%反射率下探测距离达250米,拥有120°超广水平视角和0.06°*0.06°超高分辨率,是全球首款实现大规模量产的1550nm激光雷达。

可能有不少朋友看到这些数据会觉得一头雾水,别慌,我们一个个来看。
首先激光雷达光源方案中的1550nm/905nm代表的是激光雷达输出光源波长,至于更深层次的原理小编在这就不解释了(主要是也解释不明白......),我们重点来看看蔚来的1550nm和理想、小鹏以及华为的905nm有什么区别。
相较于1550 nm波长,905 nm的主要优点是硅在该波长处吸收光子,而硅基光电探测器通常比探测1550 nm光所需的铟镓砷(InGaAs)近红外探测器更加成熟。无论是成本还是技术成熟度对于需要大批量装车的厂家来说都是性价比更高的选择。
而1550nm激光相比905nm的第一个优势在于更好的人眼安全性和更远的探测距离。
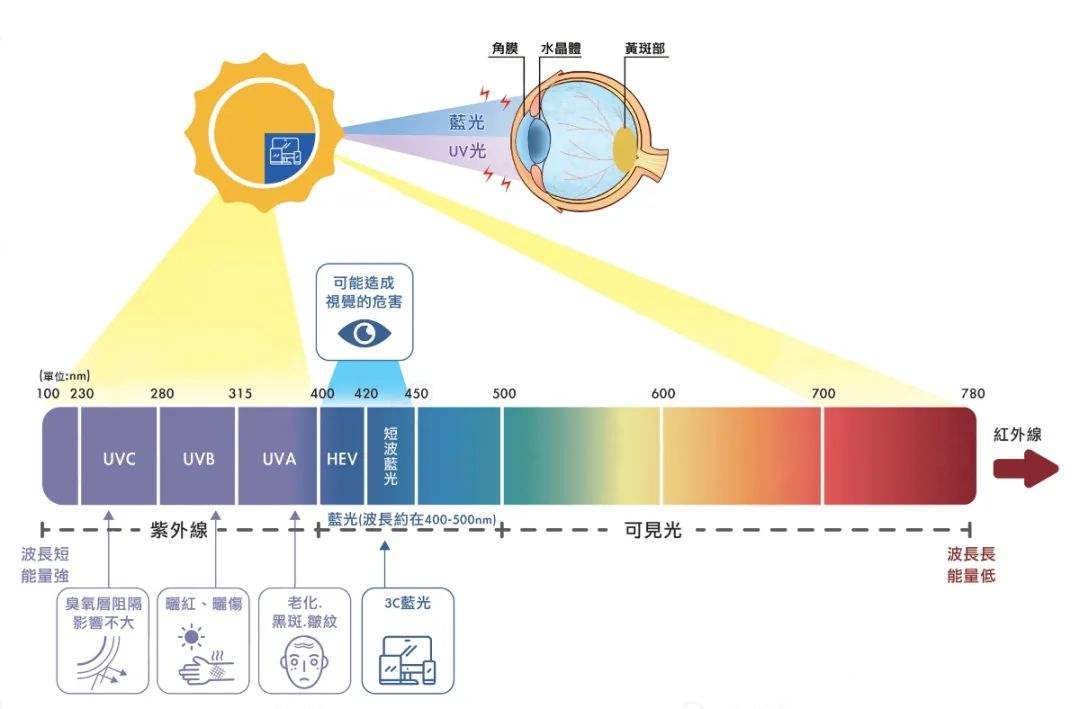
通常人眼可见光波长范围为380nm~760nm,1550nm激光远超人眼识别范围,无法在人眼视网膜上聚焦成点,且在通过眼球过程中大部分都会被水吸收,因此几乎不会对人眼造成危害;而905nm激光则更接近可见光波长,容易在人眼视网膜上聚焦成点。为保护人眼安全,通常会限制905nm的激光雷达的光功率。而在同等功率下,1550nm的人眼安全性提升可达40倍,可以允许输出更高功率,实现更远探测距离。
第二,1550nm激光的探测距离更远。在相同人眼安全等级的功率下,905 nm激光雷达很难在200 m以外的高速公路上看到高度为10 cm左右的物体,但是1550 nm激光雷达却可以将检测距离提高到300 m以上。此外,1550 nm配合调频连续波(FMCW)的技术,不仅可以检测距离,同时可以利用多普勒频移来测量物体的速度。(物理概念太复杂,你就记住它不光能测距还能测速就行)
蔚来ET7激光雷达最远探测距离可达500米,10%反射率标准下的探测距离,可达250米,而采用905nm激光雷达的小鹏G9和理想L9则分别为150m、200m。

虽然从实际需求考虑的话200m的探测距离在高速上就已经足够确保安全了,但有更多的冗余总归不是什么坏事,一旦发生紧急情况同时驾驶辅助系统出现短暂故障时,ET7还可以给你留出更多人为接管的反应时间。
第三,1550nm激光大气穿透能力强、探测精度更高。1550nm波长激光抗干扰能力强、光束准直度更好、光源亮度高,这几个优点也让激光的发射和接收更高效,可以实现更精细的物体识别。同时1550nm波长激光发散性弱、光斑小,在100米外光斑直径仅为905nm的四分之一。在探测100米处的行人时,可以接收到横排4个点,纵排️7个点的脉冲,清晰地探测到行人的姿态。
ET7的激光雷达还拥有“定睛凝视”功能,可以实现0.06°*0.06°超高分辨率。每0.01°的角分辨率变化,在200m处,相邻的两个点距离约在3.5cm。以0.1°角分辨率的激光雷达为例,其接收到的相邻两点间隔35cm,对于行人、自行车、摩托车这样的目标物体,点云过于稀疏,对于算法挑战极大。
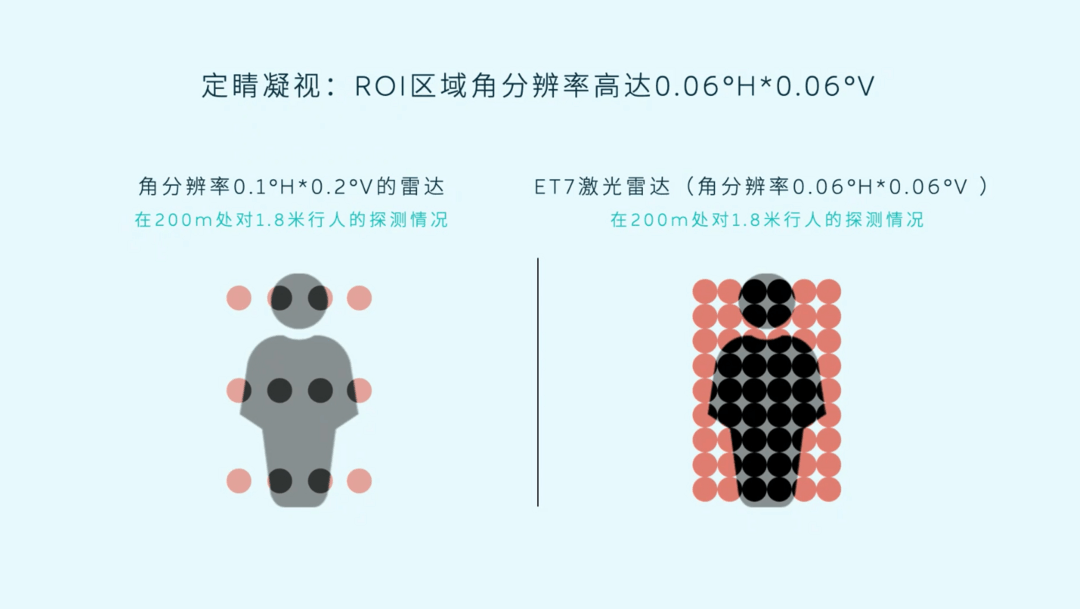
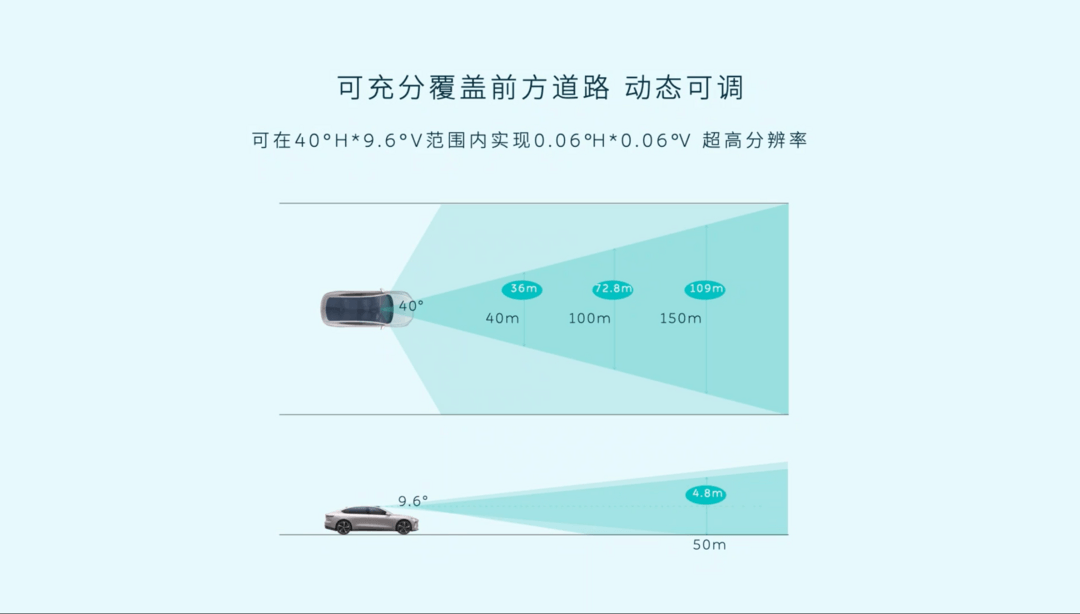
ET7激光雷达具备的"定睛凝视"功能,仿生人眼灵活变焦,可在行车关键视野区域产生角分辨率高达0.06°*0.06°的高密度点云,将该区域的目标看得更清晰。ET7激光雷达的定睛凝视功能范围为25°H(横向)*9.6°V(纵向)。在前方50m处,该区域覆盖范围:横向覆盖达10条车道,纵向覆盖大于一层楼高度),可充分覆盖前方行车区域。
ET7激光雷达定睛凝视区域策略性选择加密关键区域,而非全局铺满点,可根据需要随时让任意区域分辨率高起来。避免占用不必要的计算资源,增加功耗、带宽等,提升数据利用的有效性,减轻算法压力,更利于整车感知系统运行,真正实现“把“点”用在刀刃上”。
ROI动态可调,实现对车辆与行人等更好地感知和追踪,即便在前方大曲率转弯或者上下坡道等工况下,也可以有效地提前发现远处危险目标。更早地发现,才能更早地减速、同时更早地对用户发出警告,从而提高自动驾驶的可靠性和安全性。
最后,对于激光雷达还有一项重要参数就是POD探测概率(Probability of Dectection),一般为超过连续100帧发射的激光束数量(即理论点数量)与被探测到的激光束数量(即有效点数量)的比值。POD体现出激光雷达接收返回点数的能力和稳定性,是反应激光雷达性能的一项重要指标。

蔚来搭载的激光雷达具有优秀的探测能力,感知250m处10%反射率物体的探测概率超过90%。更高的POD,可以让车辆更清晰明确地感知到目标物体,减轻算法压力,实现更远的有效感知距离,提升自动驾驶系统整体的安全性。
以上这些都是ET7采用1550nm激光雷达的优势,那有没有缺点呢?有!
首先在雨雪天气下,1550nm的穿透能力相对905nm较弱。其次1550 nm激光雷达一般采用光纤激光器作为光源,技术相对更复杂,在光源及探测器成本、雷达体积以及供应链成熟度上还有明显的不足。并且由于功耗相对较高,所以对于激光雷达的散热性同样是一个考验。
虽然在蔚来和图达通的联合开发下,ET7搭载的激光雷达能在确保性能的前提下兼顾外观设计和整车0.208Cd的超低风阻,并且也针对可靠性和极端天气下激光雷达的性能做出了一系列严苛的测试调整,但在长期使用的情况下,这个全球首款量产的1550nm激光雷达在安全性和耐久度上的表现仍需要时间去检验。
最后再来聊聊ET7上“瞭望塔”式单颗激光雷达和极狐阿尔法S HI的固定在前杠上的三颗激光雷达相比,位置的不同有何影响?是激光雷达数量越多就越好吗?
首先激光雷达的布局位置不同主要是针对不同的使用场景,如ET7、理想L9将激光雷达布局在车顶处更多的是针对高速、封闭环路的场景。
高位激光雷达的优势在于探测距离更远、视野更好,在前车体积不大的情况下可以越过前车探测到更前方的路况。在高速行车状态下可以留有更多的安全冗余,而缺点就是车头部分存在盲区,简单理解就是“灯下黑”。所以在只使用一颗激光雷达的情况下想要实现城市领航辅助驾驶更多还是依赖毫米波雷达+摄像头感知周围环境。

而如小鹏G9、极狐阿尔法S HI则更多针对的是市区场景。低位的布局方式至少需要两颗激光雷达,优势在于车头部分没有盲区,对于路况条件更为复杂的市区道路识别精度和准确度都要更高。在应对一些突发情况时能有更快的反应能力,比如“消失的前车”、“鬼探头”、“闪现老太太”等等。缺点则是探测距离较短,在发生碰撞事故时激光雷达也更易受损,并且多颗激光雷达产生的庞大数据量也对芯片算力和核心算法考验更大。

激光雷达的数量越多就越好吗?
从对环境的感知能力来看,激光雷达的数量肯定是越多越好的,可以更全面、更准确地绘制车身周围环境的3D地图信息。但对整车的驾驶辅助方案而言,激光雷达数量越多可能并不是什么好事。
因为激光雷达只是一个数据收集传感器,并不具备决策和执行能力,只承担了眼睛的角色。硬件配置只代表了潜力的可能性,而在驾驶辅助系统中,核心算法、芯片算力、感知系统都是联动的,是木桶效应。
而激光雷达在运行过程中会产生大量数据,对于系统进行数据融合、数据运算以及芯片算力都有着极大的考验。所以在算法和算力进一步提升之前,盲目增加激光雷达数量很有可能会造成适得其反的效果,同时也徒增成本。
写在最后:
从激光雷达的产品实力来看,ET7上的这颗由蔚来和图达通联合研发的激光雷达完全可以称为目前量产车规级激光雷达中的“最强王者”。不仅是全球首款量产的1550nm激光雷达,而且探测距离更远、探测精度更高,再配合上其他高性能感知硬件和高达1016TOS的算力,ET7的硬件水平可以说是非常能打了。

所以现在最主要的问题就是软件算法要跟得上,否则“宝剑”再厉害,你拿在手里不会耍照样白搭。希望后续的蔚来NOP+(高阶领航驾驶辅助)甚至是NAD(自动驾驶)不要让我们等太久,同时也期待蔚来能给我们带来更多惊喜。
(我们都知道你蔚来的硬件水平能打,可你倒是真的开打啊!)
本文地址:https://auto.gasgoo.com/news/202206/25I70305389C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921




















