盖世汽车讯 驾驶员在要变道时,就会注意确保没有车辆出现在盲区,而这种意识对于自动驾驶系统而言也非常重要。因此,自动驾驶技术需要依赖强大的感知中枢,而该中枢预计可以识别环境中所有相关的主体,包括预测道路上其他车辆的精确“姿态和形状”。
(图片来源:Argo AI)
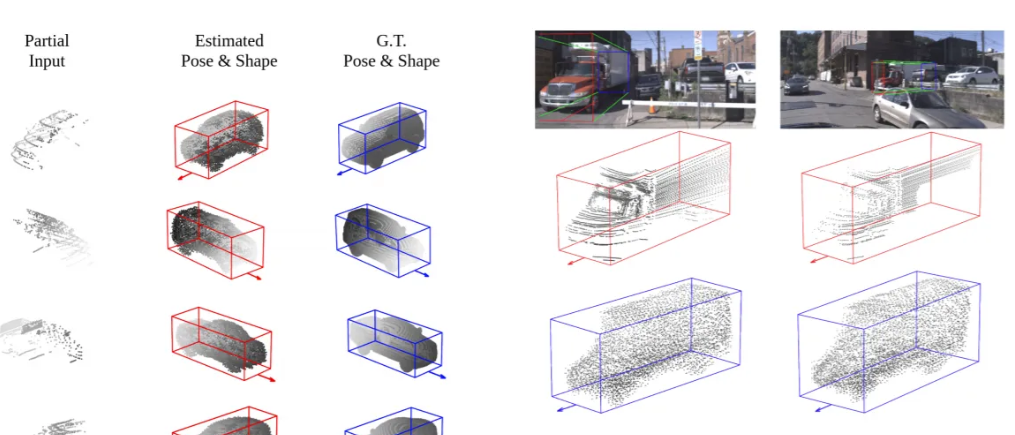
现在,自动驾驶汽车系统可以利用最常见的传感模式之一——激光雷达的数据来观察周围情况。据外媒报道,自动驾驶汽车技术公司Argo AI、微软和卡内基梅隆大学(CMU)的研究人员合作,推出了一个全新的网络架构,可以通过部分激光雷达的观测信息估计车辆的形状和姿态。
现在用于预测姿态和形状的SOTA法通常会首先估计局部点云的姿态,然后在部分输入信息中加入该姿态,再预测形状。不过,此种编码—姿态解码以及编码-形状解码架构会导致形状估计误差,最终的性能很差。此外,部分输入的信息被冗余编码两次。
因此,为何不使用一个共享式编码网络以估计姿态和形状呢?
研究人员采用该策略,将编码合并到一个过程中,以减少冗余,并在共享式编码网络中实现稳定的姿态和形状估计。
训练该共享式编码网络可分为两部分。首先,对编码器和补全解码器进行形状补全训练。接下来,冻结编码器,并采用冻结编码器产生的代码对姿态解码器进行训练。冻结是通过逐步冻结隐藏层来加速神经网络训练的常用技术。与基线网络相比,用此种方法训练的姿态估计器的精度得到显著提高。
未来,Argo AI会在追踪等下游模块中利用该形状估计模型,并在实时系统中采用该种新型架构。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202010/29I70214243C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921