

想象一下,当你去超市购物,你只需要把车停在超市门口,然后让它自己去找停车位;当你去公司上班,只要把车停在公司门口,人就可以走掉;或者,当你回到小区,随便在哪下车,车子都可以自己去找你家小区的停车位;又或者,在雨天,你只需要站在自家门口,遥控一下,车子就能自己来找你。试问,这“最后一公里的自由”,谁不想拥有呢?
而要拥有以上体验,显然需要AVP(自主代客泊车,Auto Valet Parking)的配合。不过,听起来便很高大上的AVP是否会像无人驾驶一样,可能要大家等到 “青丝变白头”呢?答案是否定的。事实上,尽管AVP在原理上和自动驾驶极为相似,都是借力于大量的传感器来获取周边情况,包括摄像头、激光雷达、毫米波雷达等,但AVP更容易实现。
一方面,正如文章开头所说,汽车消费者对于AVP的需求迫切;另一方面,公共的道路有相应的政策法规限制,而AVP的应用场景则通常是封闭的,相应的限制相对较小;此外,较之完全自动驾驶,AVP所涉及的场景复杂度、技术难度相对较低。

正因如此,AVP领域引来诸多企业的布局,该领域的竞争如今已然如火如荼。不过,AVP显然没有想象中的那么简单,如今仍存痛点,例如由于准确度没有足够高,而导致无法一次性完成准确地路径规划,因此无法实现较佳的用户体验等等。诸如此类的问题还需要技术的持续升级。
作为国内出色的自动驾驶初创企业,纵目科技涉足智能泊车已有多年。近日,在第一届泊车智能生态圈论坛上,纵目科技就亮出了其在AVP及相关领域的最新成果。
智能传感器SDR1毫米波雷达
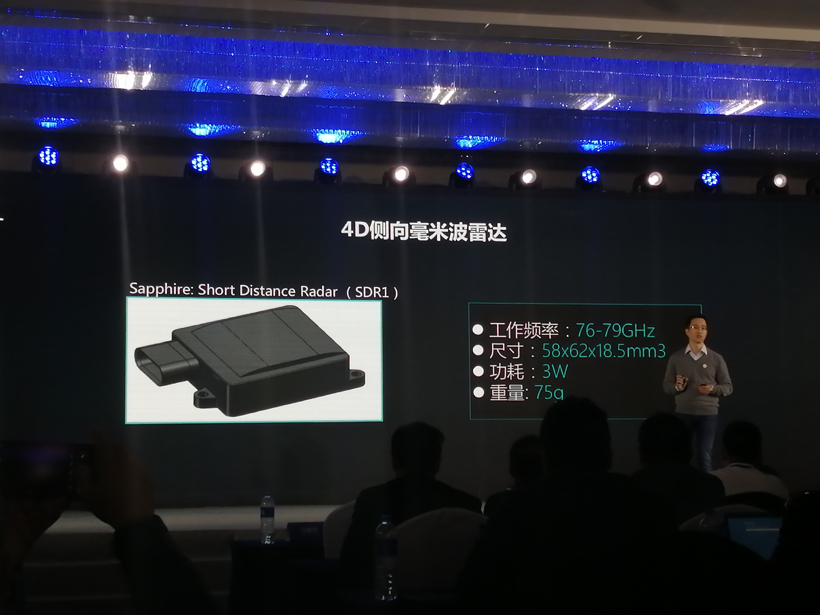
SDR1毫米波雷达是第一款可以用于低速无人驾驶的4D毫米波雷达,能为自主泊车提供低成本、全天时、全工况的环境感知解决方案。相对于传统的雷达,SDR1能够针对泊车的典型应用场景(地下/地面停车场、园区等)进行专项优化,此外,其还能把水平、垂直角度检测精度做的非常好,从而完美的契合泊车场景的各种应用需求。
而在定位方面,其可比拟激光雷达,清晰勾勒出周边建筑物轮廓,实现基于雷达点云的高精度定位。和最小检测距离在50公分到1米的普通毫米波雷达相比,SDR1毫米波雷达可以达到10公分。
纵目科技毫米波雷达负责人李旭阳还表示,这款产品在价格上同样具备优势,SDR1毫米波雷达是激光雷达的五十分之一,而且可以用十年而不是用几千个小时就要更换,所以它无论对无人驾驶泊车还是高速无人驾驶都是非常有吸引力的。
新一代L3级别Drop’n Go平台
作为纵目科技新一代L3级别泊车系统平台,Drop’n Go平台,分为两个版本:Lite和Premium。二者的传感器区别在于4D毫米波角雷达,功能区别在于L3级别的两个功能,原路返回和HPP。
原路返回考察的是定位能力,尤其是在窄胡同里车的定位误差控制在20公分以内,纵目Drop’n Go回到原点的误差可以控制在10个公分以内,相比于国外同类产品,其精确度提高了5倍。
而HPP是新一代L3级别Drop’n Go平台最大的亮点,全称为Home Zone Parking pilot,也叫做记忆式泊车系统,它通过车辆自身传感器,学习、记录并储存用户常用的下车位置、停车地点及泊车行进路径。然后当用户驾车再次到达记录的下车位置时,系统提示“HPP无人泊车功能”可以使用,此时驾驶员只需下车,通过手机APP操作,车辆就可以精准地自动驶入停车位。与AVP最大的不同点是应用区域不需要提前采集高精地图,更适用于家庭园区和办公场地等常用场所。
此外,据了解,纵目科技的HPP适用于各种复杂应用场景,比如有地面、地下、跨层、车道线的磨损或者没有车道线;适用各种应用环境,比如白天、夜晚、黄昏、刮风、下雨、雾霾等等。
基于非常出色的建图能力,融合的毫米波雷达和摄像头的SLAM技术,实现了非常好的对环境的适应能力以及定位鲁棒性,极大提高了用户体验。
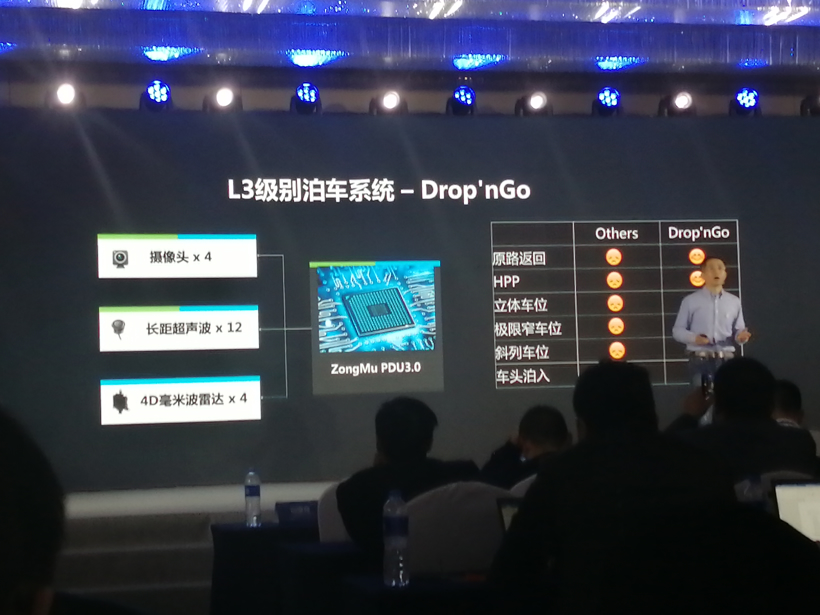
第二代自主泊车系统(AVP Gen.2)产品
纵目科技在2017年推出了世界上第一个没有使用激光雷达的L4泊车场景AVP Gen.1,并解决了用环视摄像头在地下停车场实现定位的功能。而今年,在AVP Gen.1的基础上,纵目科技研推出了AVP Gen.2的产品。
新一代产品基于纵目科技新一代毫米波雷达和视觉算法深度融合,可支持地面、地下、跨层通道等更多场景;支持白天、晚上、雨天等更多环境;定位算法鲁棒性提升;避障、绕行,安全性提升。可以支持更复杂的ODD,同时新增了办公园区、写字楼、酒店三种场景。
具体来看,AVP Gen.2的产品,采用的是低速域控制器,主要传感器方面采用4个鱼眼摄像头、12个超声波传感器以及4个4D毫米波雷达。纵目科技的毫米波雷达可以输出可比拟激光雷达的致密点云信息,清晰勾勒出周边建筑物轮廓,从而实现基于雷达点云的高精度定位,因此在仅依靠毫米波雷达的情况下(视觉失效),就可以完整实现AVP功能。
通过以上可以看出,智能泊车技术正在从各个维度进行快速提升,而在这一过程中,有些问题不容忽视。
前面提到,纵目科技第二代自主泊车系统在仅依靠毫米波雷达的情况下(视觉失效),就可以完整实现AVP功能,这是否意味着其会取代其他传感器?未来的传感器格局将会出现何种演变?
针对此,纵目科技股份有限公司CEO唐锐在接受盖世汽车采访时表示:“传感器的稳健技术非常重要,不同的传感器是需要从不同的角度解决不同的场景需求,现在AVP的场景需要用比较成熟的、可量产的传感器尽可能多的加上来,把产品做好。我们的AVP也是用三重努力打造比较高的公共安全的领域。我们给大家展示的是一个场景,其实更多的场景是三个传感器同时发挥作用,进一步提高系统的冗余度。所以多重方案是必须的。”
AVP需要多重技术方案的配合,而放大到整个行业来看,AVP的发展则需要整个行业的众多参与者去构建比较成型的生态圈,共同去解决一些行业共性问题,例如用户的使用安全问题、安全责任的划分问题以及企业的盈利问题等等。
对此,唐锐指出,关于安全,首先要通过严谨的方法来保证设计,来保证系统;其次要经过验证和测试,车企如果没有办法测试得充分的话,是不可能让你上市的,所以不管是科技公司还是主机厂都会以很负责任的态度来做这部分工作。“至于责任划分的问题怎么解决?L3和L4主要的责任是技术方,车企在第一线,我们可能在第二线,中间未来可能也会出现新的产品形态,比如联合保险一起来解决这个问题。”
安全与责任问题之外,对于企业来说,最重要的就是利益问题了。自主泊车迟迟没能实现商业化,重要原因之一就是,没人愿意为高成本的场端建设投钱。那么未来这个自主泊车市场到底谁来买单,是2C还是2B呢?
唐锐认为,从目前来看,AVP要实现商业化,最后的方式一定是要跟场端打通的。诸如纵目科技一类的科技公司把系统接起来,然后相应的合作伙伴来投资,这个方案才是真正的有可能进入大规模的量产的方向,才有可能获得应用。“至于是2B还是2C?我认为最后应该是可以被消费者接受的服务形态(我们的判断)。我们会一起跟合作伙伴讨论合作的模式,看大家怎么构建联盟,把相应的服务模式给做起来。”
盖世小结:
随着各家相关产品与技术的陆续推出,AVP已离我们越来越近。未来的停车场景会是槽点满满?还是会如我们想象一般完美?或许我们很快就会有答案了!
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/201912/16I70145973C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














