

盖世汽车讯 自动驾驶汽车的激光雷达传感器通过发出红外光脉冲,并测量它们从物体上弹回的时间,传感器创造点云,建立汽车周围环境的3D快照,从而帮助车辆行驶。理解原始的点云数据十分困难,而且在机器学习时代到来之前,需要训练有素的工程师明确他们希望手动捕获的特征。据外媒报道,麻省理工学院计算机科学与AI实验室(CSAIL)研究人员最新发表了一系列论文,表示可以利用深度学习自动处理3D成像应用的点云。
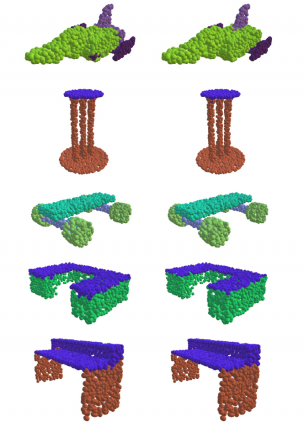
(图片来源:麻省理工学院)
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/News/2019/10/28I70135085LC409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














