盖世汽车讯 据外媒报道,宾夕法尼亚大学(University of Pennsylvania)的工程师们开发出新系统,利用人工智能处理无线电波,使机器人能够“看到”拐角处的景象。这项技术有望提升无人驾驶汽车以及在仓库、工厂等室内复杂环境中运行的机器人的安全性和性能。
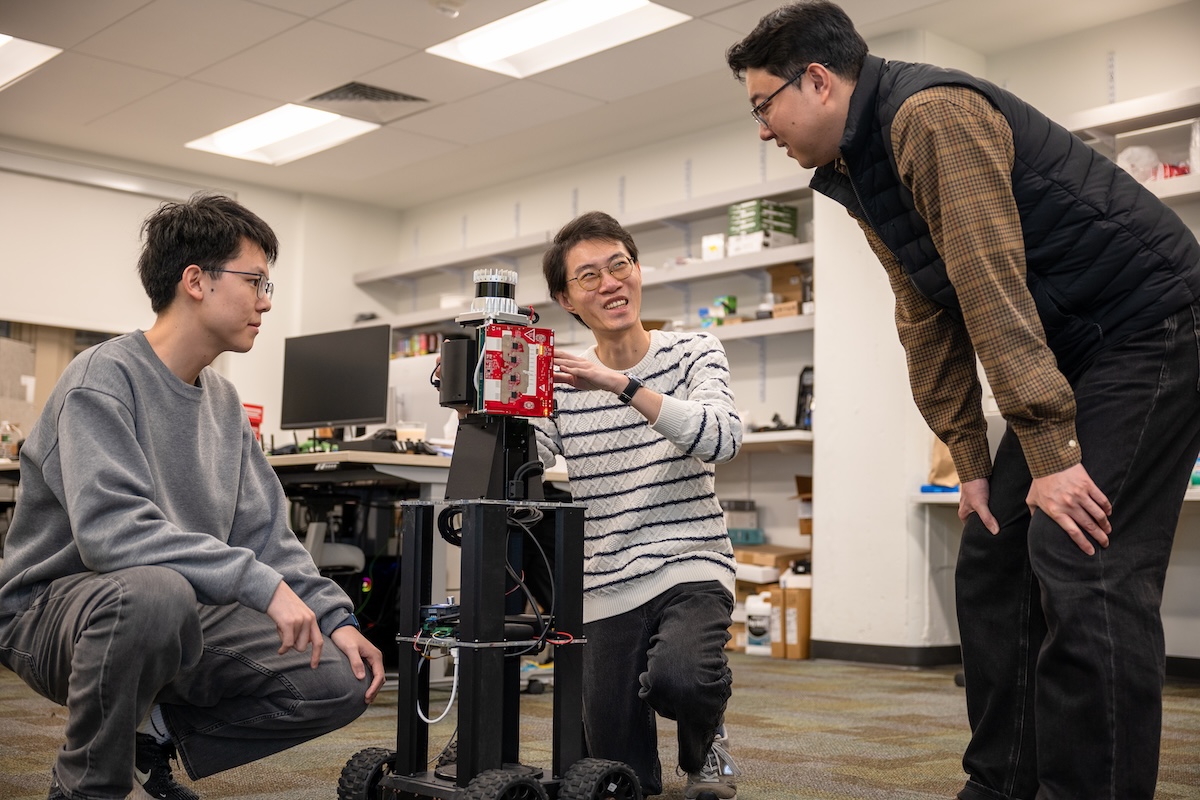
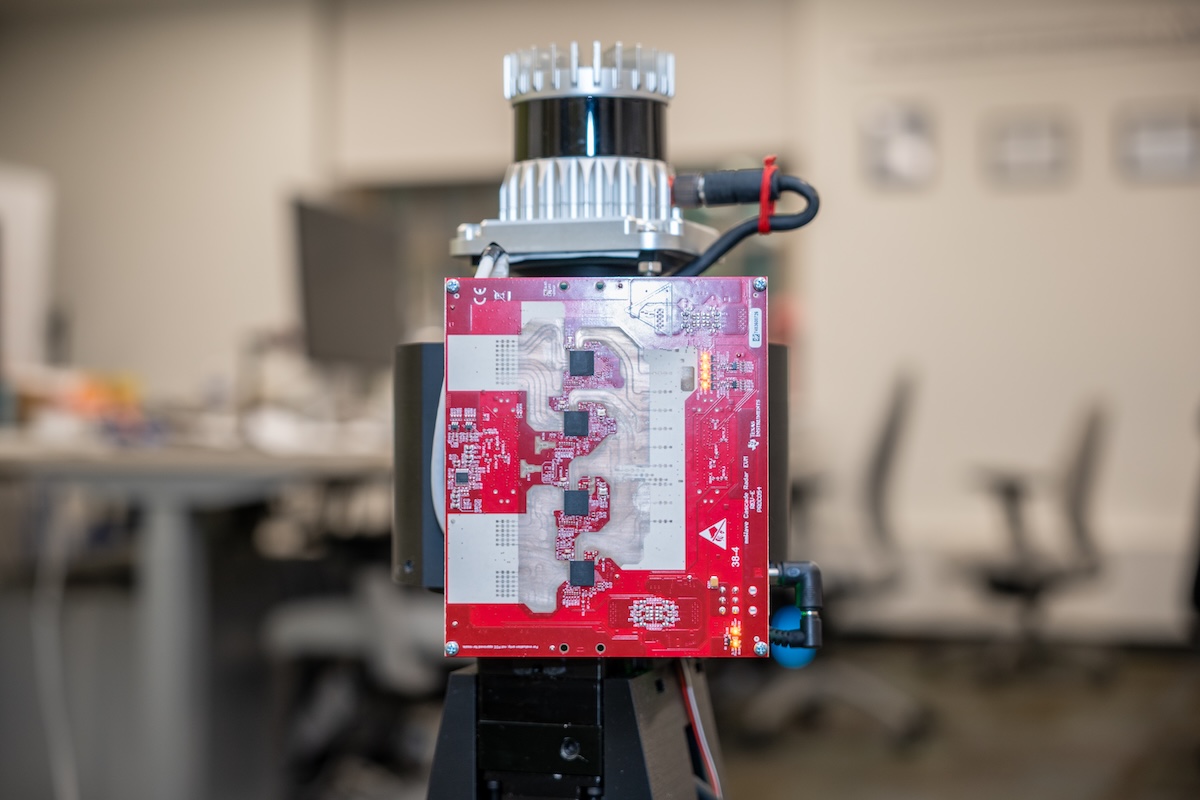
图片来源: 宾夕法尼亚大学
该系统名为HoloRadar,能够让机器人重建视线范围之外的三维场景,例如行人转弯。与以往依赖可见光的非视距(NLOS)感知方法不同,HoloRadar在黑暗和光照条件变化的情况下也能可靠运行。
“机器人和自动驾驶车辆需要看到正前方以外的景象,”计算机与信息科学系助理教授、HoloRadar相关论文的资深作者Mingmin Zhao表示。该论文在第39届神经信息处理系统年会(NeurIPS)上发表。“这种能力对于帮助机器人和自动驾驶车辆实时做出更安全的决策至关重要。”
将墙壁变成镜子
HoloRadar的核心在于对无线电波的一种反直觉的洞察。与可见光相比,无线电信号的波长要长得多,这一特性通常被认为是成像的劣势,因为它会限制分辨率。但赵教授的团队意识到,对于观察墙角之外的情况,这些较长的波长实际上是一种优势。
为了解决这个问题,研究团队开发了一种定制的人工智能系统,该系统结合了机器学习和基于物理的建模。在第一阶段,该系统提高了原始无线电信号的分辨率,并识别出对应于不同反射路径的多个“返回”信号。在第二阶段,该系统利用物理模型反向追踪这些反射信号,消除环境的镜像效应,并重建真实的3D场景。
“从某种意义上说,这就像走进一间满是镜子的房间,”电子与系统工程系博士生、论文合著者Zitong Lan说道,“你会看到同一个物体在不同位置的反射,难点在于如何确定它们的真实位置。我们的系统能够以符合物理学原理的方式,学习如何逆转这一过程。”
通过对无线电波在物体表面反射的方式进行显式建模,人工智能可以区分直接反射和间接反射,并确定包括人在内的各种物体的正确物理位置。
从实验室到现实世界
研究人员在真实的室内环境中,包括走廊和建筑拐角处,使用移动机器人测试了HoloRadar系统。在这些环境中,该系统成功地重建了墙壁、走廊以及位于机器人视线范围之外的隐藏人员。
未来的研究将探索室外场景,例如十字路口和城市街道,在这些场景中,更长的距离和更动态的环境会带来额外的挑战。
Zhao教授表示:“这是让机器人更全面地了解周围环境的重要一步。我们的长期目标是让机器能够在人类每天穿梭的动态复杂环境中安全、智能地运行。”
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202602/13I70446977C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921