盖世汽车讯 据外媒报道,密歇根大学(University of Michigan)研究人员开发出新人工智能(AI)模型,可训练人形机器人进行徒步旅行,有望加速具身智能的发展,使其能胜任自主搜救、未开发地区生态监测等任务。
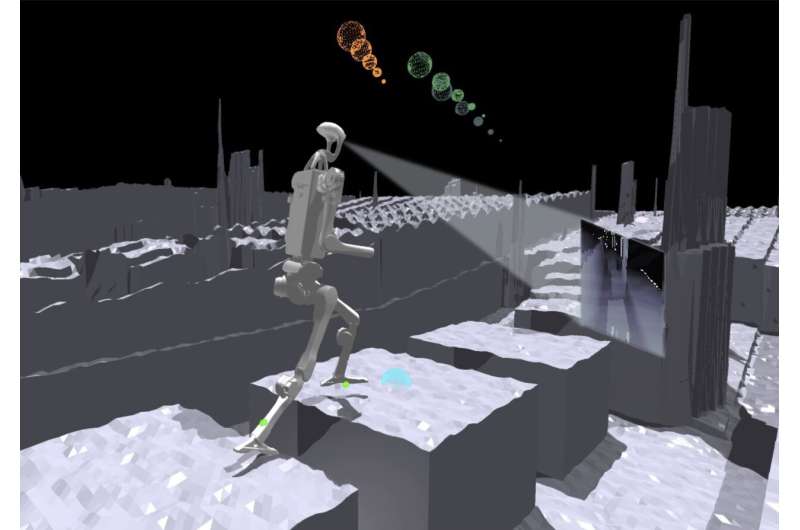
图片来源:密歇根大学
借助名为LEGO-H的新型人工智能框架,研究人员训练了配备摄像头的Unitree机器人公司人形机器人,使其能够提前规划路线、避开障碍物、保持平衡姿态,并根据崎岖地形调整速度和步幅。
计算机科学与工程学教授、该研究论文的通讯作者Stella Yu表示:“我们的模型首次赋予人形机器人完全自主的视觉感知、决策和运动能力,它不仅能行走,还能根据路径需求进行跳跃、跨步或跳跃。此前人形机器人基本处于‘失明’状态,每个动作决策都依赖人类操作员。”
传统上,机器人通过预先构建的地图和持续的人工指导,在平坦无障碍的表面上学习导航,其中高级规划(“去哪里”)和低级执行(“如何移动”)被视为独立的问题。
计算机科学与工程研究员、该研究首席作者Kwan-Yee Lin表示:“将导航和移动整合到单一策略学习框架中,可以使机器人能够根据实际情况自主制定移动策略,无需人类预先编程模式。”
在仿真实验中,人形机器人被投放到陌生路径上,要求导航至特定目标点。这些机器人仅配备视觉输入、身体感知能力及简易GPS方向指引(如“目的地位于东北方向0.3英里处”),而非逐段路线导航。
虚拟机器人分为成人体型(约1.8米)和儿童体型(约1.2米),在五种不同类型的路径上进行徒步测试,每种路径均设五个难度等级。评估指标涵盖路径完整性、安全性及效率表现。
与事先获得完美导航和环境信息的机器人相比,仿真自主机器人在效率和安全性方面与之不相上下甚至更胜一筹。研究人员表示,其内置的身体感知能力有助于避免损伤,而移除该功能会显著降低徒步成功率。
虚拟自主机器人学会根据地形调整身体姿势和运动方式。例如遇到狭窄空间时,机器人学会侧身倾斜以挤过障碍。它们还能根据障碍物选择路径,绕行高障碍物,跨过低矮障碍物,若无法跨过则选择绕行。
Lin表示:“令人惊叹的是,虚拟机器人能在跌倒后重新恢复平衡,这是以往人形机器人从未展现的能力。我们并未编程实现这一功能,它是机器人学习与环境交互过程中自然形成的。”
在这项初步研究中,机器人的上半身保持固定状态,因为添加上半身动作会大幅增加建模复杂度。随着这项概念验证研究在腿部运动方面取得成功,研究团队正致力于实现全身协调登山,以充分利用机器人的全部自由度,在行走过程中最大化稳定性、安全性和效率。
研究团队正积极推进将这些策略应用于现实世界中的实体人形机器人。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202509/18I70433781C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921