

盖世汽车讯 据外媒报道,通用汽车(GM)提交了基于高度的车辆导航路线系统专利申请。该申请已向美国专利商标局(USPTO)提交,专利号为US 12,313,413 B2,提交日期为2022年11月14日。申请于2025年5月27日发布,发明人包括多位工程师,包括 Donald K. Grimm、Talus Park和Tomislav Babic。
图片来源: USPTO
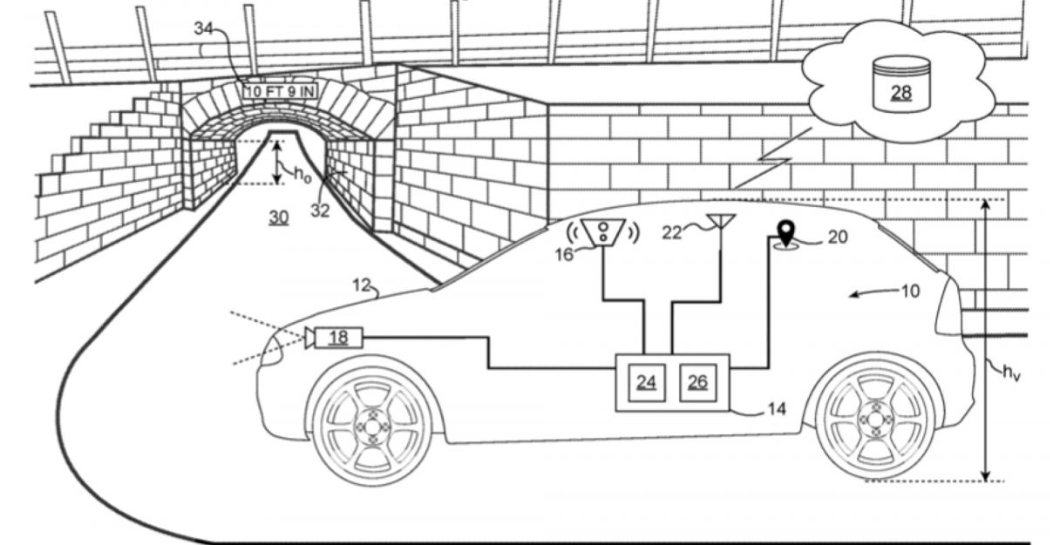
通用汽车的专利申请描述了一种导航系统,该系统使驾驶员能够根据车辆的高度间隙需求选择路线。该系统旨在防止高大车辆(例如带有车顶行李架的卡车、拖车或货物)与低矮立交桥或其他高架障碍物相撞。该系统结合使用GPS、无线通信和专用控制器,根据车辆高度和前方可能存在的障碍物来确定安全路线。
该系统与现有导航工具的不同之处在于,它并非仅仅依赖静态地图数据。相反,它会主动考虑路线沿途障碍物的实时或更新净空数据。它的工作原理是收集多辆车辆的障碍物高度测量数据,将数据存储在共享数据库中,并据此计算不同路线的“舒适度评分”。该评分可以告知系统每条路线对于特定车辆的净空高度安全程度。如果车辆正在牵引车辆,系统可以询问驾驶员拖车高度并相应地调整净空高度。它还可以自动检测牵引状态。
为了确保一切正常运转,控制器会将车辆高度与前方障碍物的高度进行比较,从而计算得分。如果检测到潜在的间隙问题,系统会向驾驶员发出警报。用于计算路线安全性的模型甚至会考虑车辆行为,例如速度或转向角度,以进一步优化得分。
该系统对于需要避开低矮桥梁或其他限高区域的高大车辆驾驶员来说,显然非常有用。在地图数据可能过时或存在临时障碍物的现实情况下,该系统也尤其有用。该系统能够收集和更新来自多辆车辆的数据,使其随着时间的推移更加准确,有助于提高安全性,并防止因间隙问题而导致代价高昂或危险的事故。

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202507/24I70429801C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921

















