随着“智能化平权”的到来,市场竞争日趋白热化,车厂对于通过座舱和智驾功能集成实现系统降本有了更高的需求。
芯驰科技以单座舱芯片X9SP实现了智能座舱与泊车功能的深度融合,实现了多屏联动流畅无卡顿、语音指令秒级响应、环视影像实时校准、DMS面部特征毫秒级追踪;同时还实现泊车轨迹厘米级规划,在保障行车安全的基础上,让自动泊车系统可智能规避盲区障碍,完成复杂场景下的精准停泊。目前,基于X9SP的舱泊一体解决方案已获得多家客户认可和合作。

本文将从技术架构、功能实现、场景创新三大维度,深度解读 X9SP 单芯片舱泊一体方案如何面向跨域融合、技术降本等趋势,为车企提供一体化的高效、可靠、经济的解决方案。
1. 舱泊一体产品解决方案的价值
• 用户体验升级
○ 交互便捷性:智能座舱通过语音控制、多模交互(触觉、视觉、生物识别)等技术简化操作,减少驾驶分心风险。例如,某新能源车型通过动态氛围灯与大屏联动打造沉浸式体验,语音交互可控制座舱行为。
○ 场景化功能:座舱逐渐演变为“第三空间”,支持娱乐(如KTV、观影)、健康监测(座椅调节、晕车舒缓)等功能,满足用户在通勤、短途旅行中的多样化需求。
○ 个性化服务:基于AI大模型,座舱可主动感知用户需求,提供自然对话、智能推荐等服务,提升情感化交互体验。
• 技术集成与生态拓展
○ 硬件创新:大屏化、多屏联动(如30英寸以上屏幕)、AR-HUD、电子后视镜等技术普及,Mini LED/AMOLED显示技术逐步量产。
• 功能与成本优化
○ 功能集成:传统泊车与座舱功能分属不同域控制器,而舱泊一体通过硬件集成实现算力共享,降低部署成本30%以上,同时提升泊车精度和成功率。
○ 安全认证:通过ASIL-B功能安全认证,确保泊车功能的安全性,例如某供应商支持1公里自动泊车并兼容记忆泊车等高阶功能;
2. 技术方案架构
2.1 X9SP 产品介绍

X9SP 是 X9系列核心旗舰产品,是面向智能座舱与跨域融合场景设计的全场景车规级SoC芯片,具备高性能和高可靠性,特别适用于舱泊一体的解决方案。

• 算力配置:
○ CPU资源:100K DMIPS
○ 双GPU架构:仪表与中控域硬件隔离,无虚拟化开销,支持跨域冗余算力调用
○ NPU:8TOPS算力,同步支持DMS/OMS与APA算法并行部署
○ ISP:1Gpixel/s处理能力,支持Camera RawData调优
○ VPU:多格式编解码能力,最高支持4K@60fps
• 安全架构:
○ 独立安全岛:可替代外置MCU,按照ISO 26262 ASIL D功能安全设计,部署泊车控制、超声感知处理和泊车数据交换处理逻辑。
○ 接口支持:双路CANFD,xSPI可挂载OSPI/QSPI。
○ 软件架构:AutoSAR+FuSalib框架,提供功能安全监测能力。
• 软硬件兼容:
○ 与上一代X9HP保持Pin-to-Pin兼容架构,并采用同一套软件基线,支持车型快速升级与量产,大幅缩短开发周期。
2.2 单芯片舱泊一体方案
2.2.1 方案概览
X9SP创新性实现“舱泊一体”架构,通过硬件集成方式将座舱域(中控/仪表/车载娱乐/语音交互/应用生态)与泊车域(APA自动泊车/环视影像/DVR行车记录/DMS驾驶员监测)功能统一部署在单一计算平台。该架构依托内置安全域处理车身信息并采用片内总线与应用域进行传感器数据流的交互,对比传统外置MCU方案,既保障了安全可靠又实现系统架构的简化与性能优化。

2.2.2 核心优势
X9SP单芯片舱泊一体方案通过SoC级集成重构汽车智能化架构,核心优势包括:
• 座舱域整合:单芯片承载IVI/3D仪表/HUD多模态交互环境,实现座舱系统复杂度与硬件成本双降低。
• 交互范式升级:融合触控/语音/视觉多模交互通道,构建直觉化人机界面。
• 泊车算法融合:采用多传感器融合架构(视觉+雷达),实现全场景泊车精度优化。
• 控制架构革新:内置MCU构建集成式控制单元,消除外置控制单元依赖,提升系统实时性与可靠性。

2.3 X9SP + E3118 整车舱泊方案
2.3.1 方案概览
在考虑客户需求进行舱泊一体系统的升级时,我们提供了一种基于芯驰X9SP单芯片的解决方案。如果客户更偏好传统的系统架构,我们还有芯驰X9SP与芯驰E3118的组合方案。此方案不仅保留了X9SP的强大处理能力,还通过E3118 MCU增强了系统的灵活性和可靠性,确保技术路线的平稳过渡。这种组合方式既能满足客户对高性能的追求,又兼顾了传统SoC+MCU架构的优势,为系统设计和开发提供了更灵活的选择。
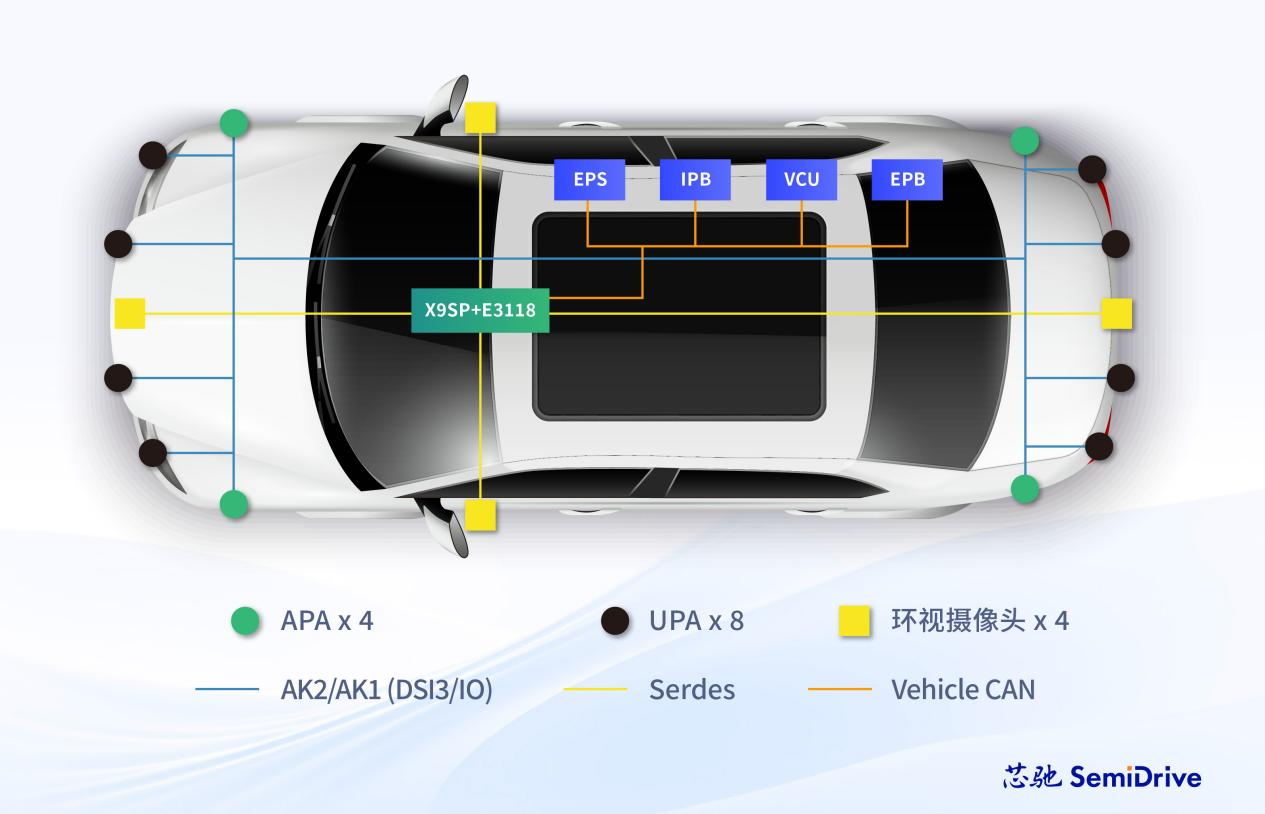
2.3.2 芯片模块资源分工
• E3118
○ 提供1.5K DMIPS计算能力,部署控制、超声算法,具备169个可用IO、8路CANFD和6路SPI接口资源。
○ 通过CAN总线与底盘控制器(EPS/IPB/VCU/EPB)进行通信控制。
○ 12路USS信号通过SPI转接,支持DSI3接口的雷达传感器数据获取。
• X9SP
○ 通过SPI与Ethernet接口与E3118通信。
○ 支持4路130W AVM环视摄像头(Serdes接口接入)。
○ 执行视觉算法、数据融合、规划处理及AI运算,实现3D HMI交互。
2.3.3 核心优势
1. 高效协同与性能优化
• 接口通信优化:采用SPI和Ethernet组合接口替代传统SPI+UART方案,结合X9SP构建的VLAN内部数据转发机制,提升带宽能力与实时处理精度。
• 芯片协同机制:通过高速接口实现数据共享与功能联动,强化系统响应能力和稳定性。
2. 扩展性与集成设计
• 多功能I/O集成:E3118集成高密度I/O资源(169个IO/8路CANFD/6路SPI),兼容多种外围设备接入需求,并通过SPI转接支持12路USS信号处理,提升超声波传感系统的适配性与信号精度。
• E3118支持Ethernet,可以与SoC、PC通过Ethernet Switch互联,使用统一的调试接口。
3. 架构创新价值
• 系统结构简化:相较传统智驾芯片+外置MCU方案,通过双芯片深度协同降低硬件复杂度,缩减部署成本与维护成本。
• 传输效率提升:建立芯片间直连通信通道,消除冗余数据中转环节,增强系统实时性。
• 技术生态统一:基于同平台SoC+MCU架构,实现工具链与技术栈的标准化,降低系统迭代与维护的技术门槛。
3. 功能实现
3.1 软件架构
我们以 X9SP+E3118 整车舱泊方案进行说明。
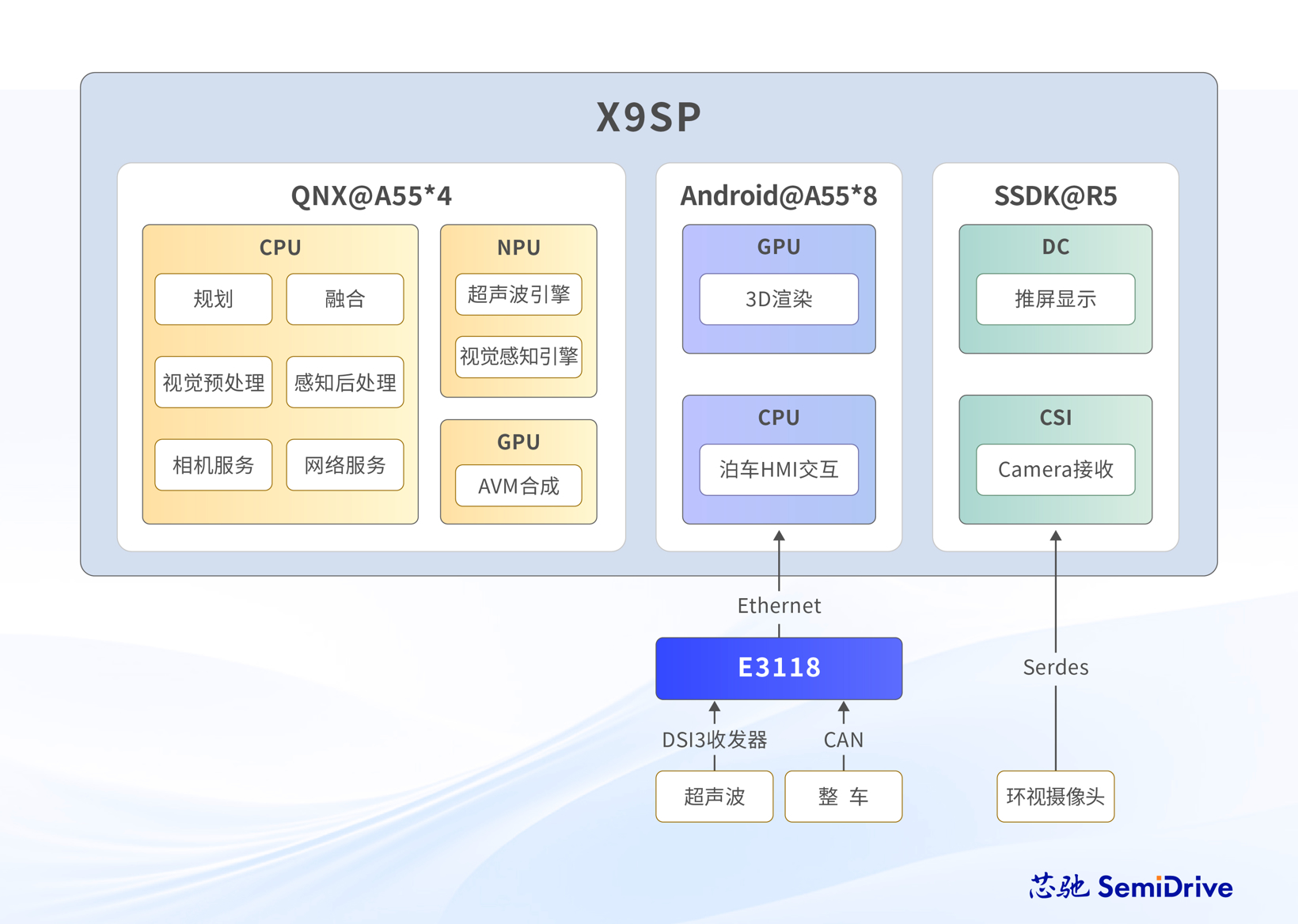
X9SP 单芯片泊车算力分配如下

1. 整体架构与功能分担:
○ AP1 (Android):在泊车场景下,AP1负责3D HMI的渲染,通过共享内存从AP2获取AVM拼接后的数据进行UI合成和显示。在非泊车场景下,AP1主要负责IVI功能,如3D车模、3D VPA、地图导航、语音交互等。
○ AP2 (QNX/Linux):在泊车场景下,AP2部署AVM算法,利用其NPU和GPU资源进行图像处理和拼接渲染。在非泊车场景下,AP2处理仪表显示、3D ADAS显示、OMS算法等,确保驾驶信息的实时性和准确性。AVM拼接后的数据通过共享内存提供给AP1。
○ MP R5 (SSDK):直接连接4路环视Camera,快速获取图像数据,为AVM算法提供原始数据支持。
○ E3118(MCAL/SSDK): 部署控制、超声算法,接入12路USS信号,与底盘控制器(EPS\IPB\VCU\EPB)通信,实现车身信息获取与车辆控制功能。
2. 资源优化与性能提升:
○ 计算资源分配:AP1和AP2分别配置了70K DMIPS和30K DMIPS的CPU计算能力,AP2拥有8.4TOPS的NPU+VDSP,确保了复杂算法的高效执行。GPU资源在AP1和AP2上各有115GLFOPS,支持高质量的图形渲染和显示。
○ 数据流动与协同工作:通过共享内存机制,AP1和AP2实现数据的快速传输和共享。E3118 MCU通过Ethernet将数据传输给AP1,确保了传感器数据和车身信息的实时性。
3. 系统可靠性与扩展性:
○ 硬件隔离:采用硬隔离架构,确保了系统的安全性和稳定性,各功能域独立运行,减少了系统崩溃的风险。
○ 扩展接口:E3118 MCU通过CAN总线与车辆控制单元连接,提供了丰富的扩展接口,支持未来功能的添加和系统的升级。
4. 用户体验与应用场景:
○ 泊车辅助:通过AVM算法和3D HMI的结合,提供直观的泊车引导,提升泊车安全性和便利性。
○ 驾驶辅助:OMS算法和3D ADAS显示在AP2上运行,提供实时的驾驶辅助信息,增强驾驶安全。
3.2 模块分工
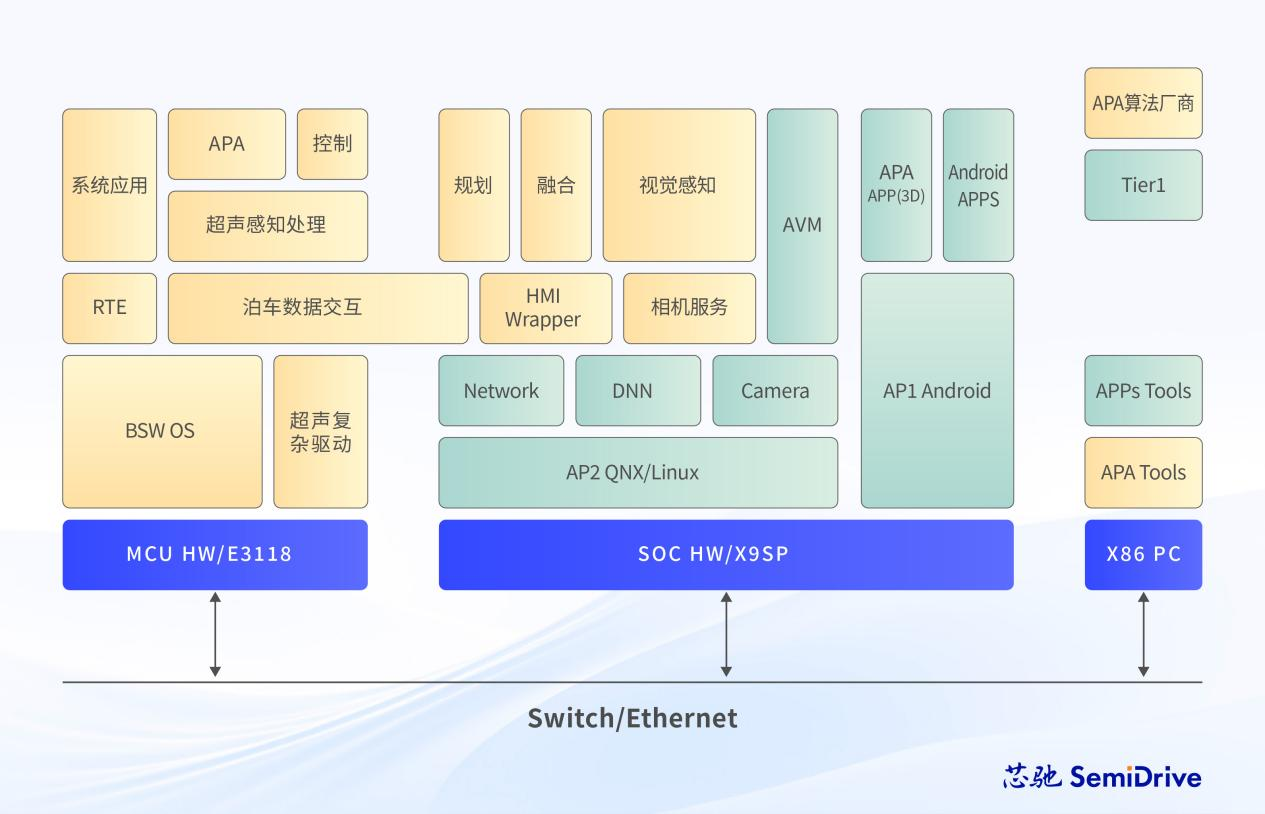
上述框图展示了芯驰 X9SP+E3118 舱泊一体软件架构设计中,各个软件模块的分工,具体细节描述如下
• E3118
○ 负责车辆控制及超声算法开发,集成驱动层与算法应用层。
○ 实现与X9SP SoC 的泊车数据交互协议。
○ 由APA算法厂商主导开发。
• X9SP
○ AP2系统(QNX/Linux)
▪ Tier1负责硬件设备驱动开发:Network通信模块、DNN推理框架、Camera图像处理链路、AVM环视系统。
▪ APA算法厂商主导上层算法部署:泊车路径规划、多传感器数据融合、视觉感知算法适配。
○ AP1系统(Android)
▪ Tier1负责应用层开发:原生泊车APP、实时3D图形渲染引擎。
3.3 系统交互机制
1. 数据链路
• Serdes接口传输多路摄像头数据至SoC。
• DNN模块执行图像识别与决策生成。
• 处理结果同步至APA控制单元和AVM环视系统。
2. 控制链路
• MCU E3118解析执行SoC下发的车辆控制指令(转向/制动/档位等)。
3.4 开发支撑体系
• 基于x86架构的远程调试工具链,支持SoC与MCU的联合调试。
3.5 产业链协作
• 芯驰:提供X9SP/E3118 SDK,含硬件抽象层与OS适配组件。
• APA算法厂商:聚焦泊车核心算法开发(APA/AVM)。
• Tier1:实现设备驱动层开发、安卓应用层开发及车厂定制化需求落地。
4. 场景创新
4.1 泊车功能陈列
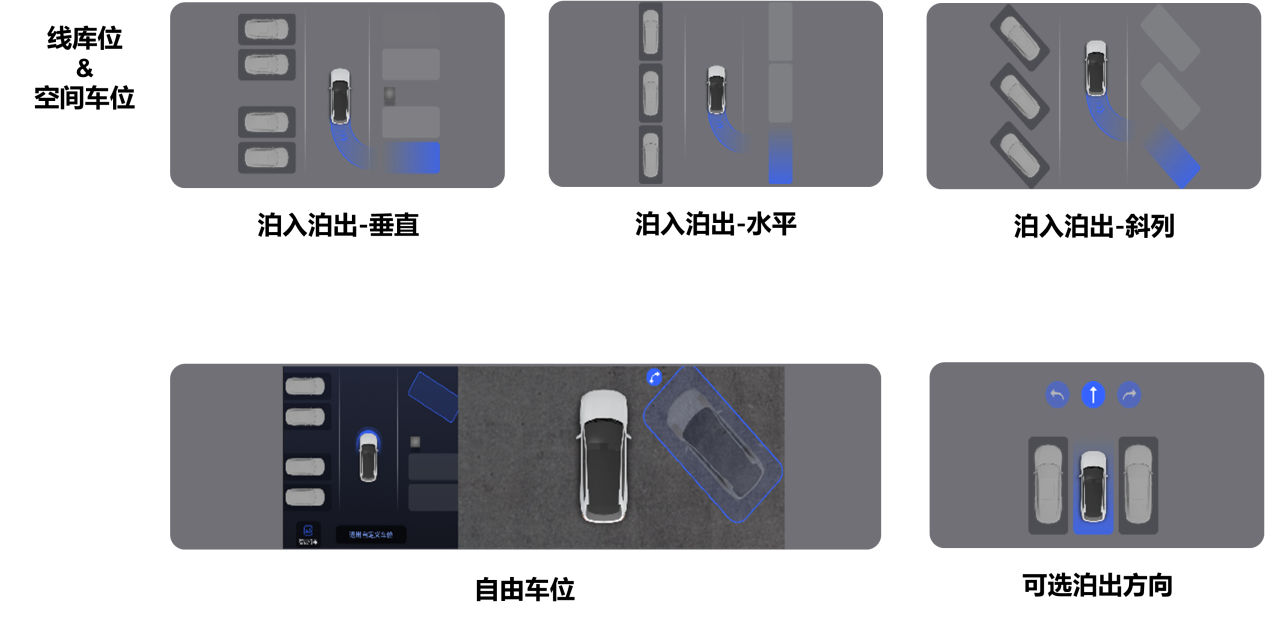
通过上图可以看到,X9SP舱泊一体泊车系统的功能方案包括:
• 自动识别车位:系统能够通过摄像头和传感器自动识别周围的空车位,无论是垂直、斜向还是平行车位。
• 车位选择:用户可以从系统识别出的多个车位中选择一个合适的车位进行泊车。
• 自动泊车启动:选择车位后,系统会自动计算最佳泊车路径,并开始执行泊车动作。
• 泊车过程监控:在泊车过程中,系统实时监控车辆与车位边缘的距离,确保安全准确地停入车位。
• 泊车完成提示:车辆成功停入车位后,系统会发出提示音并在显示屏上提示泊车完成。
• 用户界面与控制:系统提供一个直观的用户界面,显示泊车过程中的各项信息,并允许用户控制泊车系统的启动和停止。
• 无需用户干预:在整个泊车过程中,用户无需手动操作,系统自动完成所有泊车动作。
• 安全性与便捷性:系统通过自动化技术减少用户的操作复杂度,提高泊车的安全性和便捷性。
4.2 泊车功能对标

通过对比,可以看到X9SP泊车功能在整体方案上具有更高的灵活性和场景覆盖能力:
• 泊入场景全覆盖与灵活选择:在划线库位和空间库位泊入中,X9SP均能实现基本的泊入操作,并在垂直库位场景下支持车头/车尾双向泊入,为用户提供更多选择。同时,在部分特殊场景(如斜列双边)中,通过顺鱼骨尾入、逆鱼骨头入等策略,突破了竞品的局限性。
• 泊出及自定义泊车能力:X9SP不仅在泊入方面具备全面能力,在泊出场景(包括划线和空间库位各类型)也实现了功能覆盖,并且支持尾入头出、头入尾出等多种泊出方式。此外,还引入了自定义泊车功能,进一步满足用户多样化需求。
X9SP在泊车功能上实现了从泊入到泊出、从标准库位到特殊场景的全链路覆盖,凭借灵活的进退泊策略和自定义功能,形成了明显的差异化竞争优势。
5. 结语
随着“智能化平权”的持续升级,舱泊一体方案不仅只是带来技术集成的创新,更是对汽车电子电气架构变革的深度响应。通过打破座舱与泊车的功能边界,可持续助力车企以更低成本、更高效率实现智能化升级,并为未来中央计算架构的全面落地奠定基础。
在“软件定义汽车”转向 “AI 定义汽车”的新时代,芯驰以全栈技术能力与生态协同优势,持续推动中国智能汽车产业走向全球前沿;接下来,芯驰将继续推出 AI 座舱的深度产品技术解读,敬请期待。
*版权声明:本文为企业供稿,供稿企业对文章观点及内容合规性负责。如有疑义或转载需求,请联系供稿企业。
本文地址:https://auto.gasgoo.com/news/202504/10I70422627C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921