人形机器人技术面临硬件层面的挑战,特别是关节部件的成本占比高且性能要求严格。轻量化设计、高扭矩密度以及有效的冷却散热系统是实现高性能人形机器人的关键。此外,关节的寿命也是决定机器人整体寿命的重要因素。针对这些挑战,采用谐波减速器等技术方案长期来看有望降低成本并提升性能。
2025年3月13日,在第三届具身智能机器人产业发展论坛上,钛虎机器人产品及生态负责人谌威谈到,人形机器人行业的发展需要全面的解决方案,而不仅仅是单一产品的堆砌。未来的机器人将具备多场景、多形态的特点,需要专业的服务商来运营和维护。同时,随着技术的进步,关节等核心部件的性能将不断提升,成本也将逐渐降低,为机器人的广泛应用奠定基础。

谌威 | 钛虎机器人产品及生态负责人
以下为演讲内容整理:
钛虎机器人产品与解决方案
钛虎机器人成立于2020年,聚焦于为具身智能和通用自动化两大领域客户提供优质的底层软硬件解决方案,具备全栈产品的设计、研发、生产制造能力,关节、灵巧手、人形机器人等均有涉猎。
在探索各类机器人形态的过程中,我们深刻认识到一个核心问题:如果要实现人形机器人在未来高精度作业或危险环境中的广泛应用,硬件层面的瓶颈不容忽视。就当前人形机器人而言,关节部件的成本占比极高,接近乃至超过60%的比例。关节本身需满足多项关键参数要求,如提高扭矩密度以增强爆发能力,以实现奔跑等复杂动作。
在高爆发性能的要求下,我们致力于实现整机的轻量化设计,以使机器人的形态更加接近人类。除了轻量化与高爆发性能这两大关注点外,另一个常被忽视但至关重要的方面是冷却散热系统。许多机器人在视频演示中表现良好,但在实际应用中,往往在持续工作10至20分钟后便需暂停一至两分钟进行冷却。这是因为关节在大量运动、反复震荡及大电流环境下,极易出现过热现象。此外,我们还需更多关注人形机器人的整体寿命,这取决于关节的寿命,需达到数万小时。
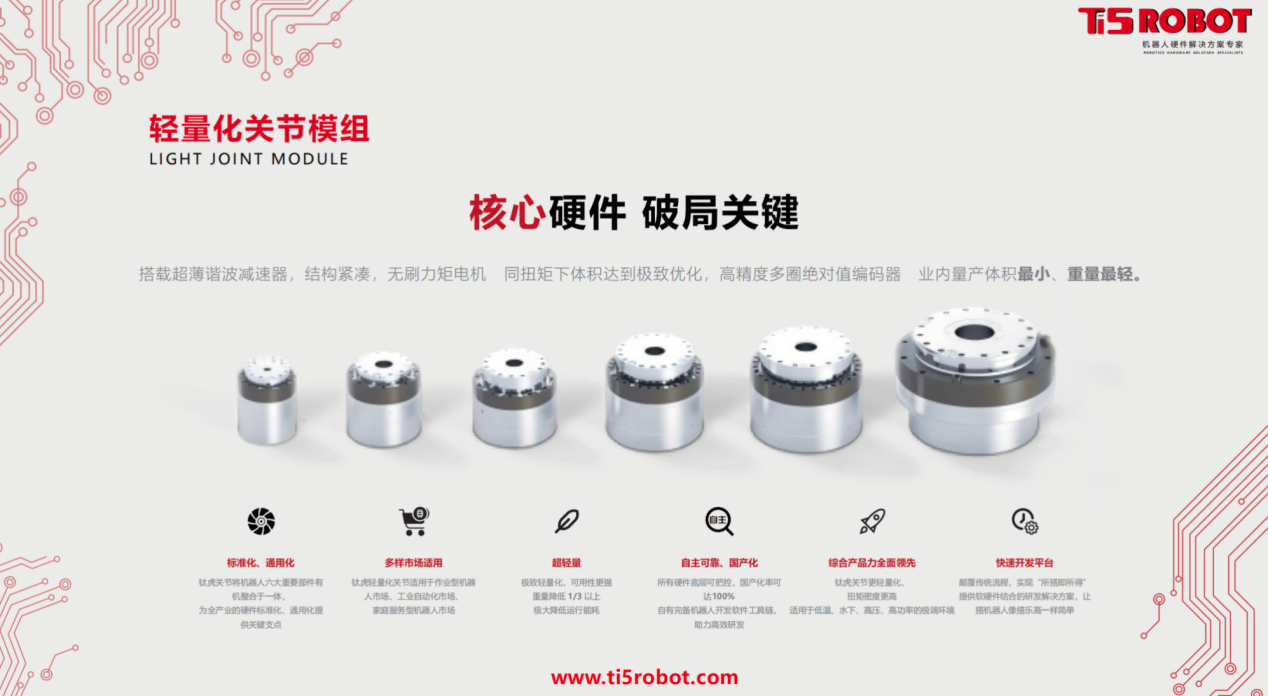
钛虎机器人拥有一套轻量化的关节模组,核心是采用谐波减速器,原因在于我们认为行星减速器的成本及其上限已相对明确,而谐波减速器在未来具有更大的降本潜力及性能提升空间,预估这一空间可达5至10倍。我们始终聚焦于最前沿的产业技术突破,而非简单地将现有成熟产品组合成低成本的解决方案。我们的目标是通过产业与技术的迭代,将原本昂贵的产品变得更加经济实惠。
图源:演讲嘉宾素材
关节本身的结构与传统汽车领域的电机产品并无本质区别,同样由电机、减速器、编码器、驱动器及刹车等组件构成。我们在优化过程中,更注重于细节层面的改进。例如,我们如何将原本分散的器件整合成一个紧凑的圆柱体,并确保这个圆柱体具备中空的走线孔。这一点之所以重要,是因为关节不仅应用于人形机器人,还广泛服务于服务机器人、工业自动化领域,甚至延伸至汽车与航空领域,这些应用场景中常常需要中空走线。因此,中空走线孔的设计与优化一直是我们公司研究与迭代的关键点。
关节的内部结构远比直观所见复杂,我们认为其复杂度甚至超越了电池系统。此外,我们还研发了多种防水关节版本,以及适用于水下场景的机械臂,其探测深度可达800米。关节的一个显著特点是其高负载自重比。以直径接近170毫米的关节为例,其单位臂长时能够承受的摆动重量范围在40至50公斤之间。
此外,基于关节技术的研发,我们成功推出了一款在行业内较为领先的超轻量化桌面级机械臂。该机械臂自重仅为两公斤,但能承载一公斤的负载。通过这款超轻量化的机械臂,我们能够应对一些特殊的应用场景。
此外是灵巧手产品。目前,我们的灵巧手在自由度方面仍局限于六个。要实现灵巧手的真正实用化,还有相当长的路要走。我们也在探索如何提升其自由度,比如尝试研发具有17个或更高自由度的灵巧手。然而,在此过程中面临的一大挑战是,在有限的空间内集成17个电机、相应的减速器以及磁编码器,会导致强烈的电磁干扰问题。同时,应用场景对于灵巧手的成功率要求极为严格。

图源:演讲嘉宾素材
相较于传统的伺服电机组合,我们的关节在保持相同输出能力的同时,能将体积空间缩减至原来的三分之一。这一改变带来了两个方向的显著影响:一是设备的轻量化程度可能降低至原先的一半;二是在相同体积下,设备的自由度可提升至原先的两倍至三倍。自由度的提升,意味着在生产工序中,我们的整条供应链和生产链所能适配的型号数量将呈指数级增长。
此外,尽管当前关节的成本相较于伺服电机仍有一定差距,但在最终形态下,由于关节的用料减少,其成本必然会低于当前行业中的伺服电机。
在特种应用领域,我们的关节也展现出了广泛的应用潜力。无论是深海机械臂、核工业管道内的多轴场景,还是火箭、导弹等高端领域,我们都能提供相应的解决方案。出行领域,我们的关节已被应用在汽车、飞机和飞行器上。此外,人形机器人领域本身也是我们能够批量提供关节的重要应用场景。
此外,人形机器人领域本身也是我们能够批量提供关节的重要应用场景。
我们有一个快速开发的软件平台,可以像搭积木一样把关节和机械臂的结构件放在某个位置,通过这种模式进行搭建。
观察与思考
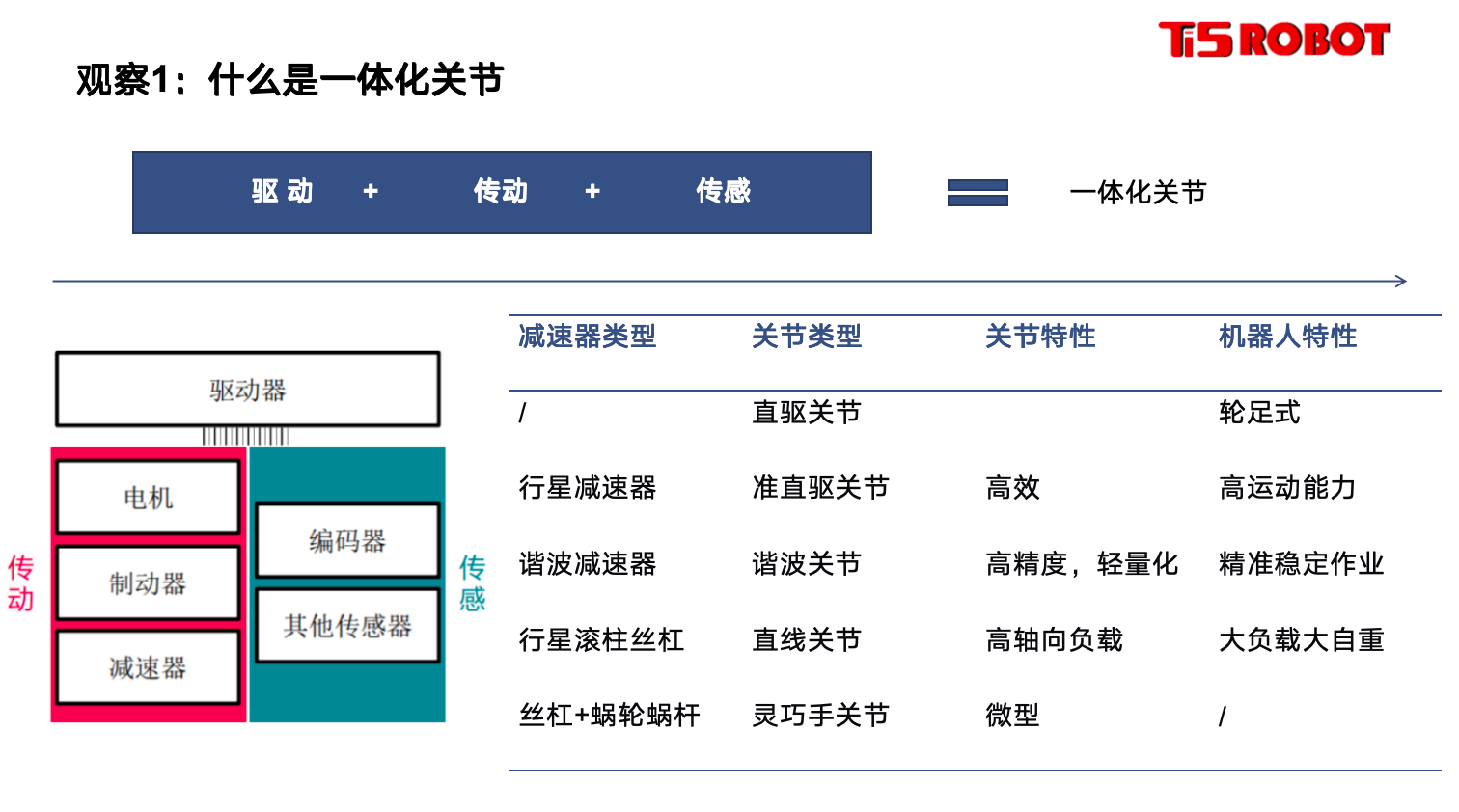
关节的核心构成实则包含驱动、传动及传感三大要素。无论其具体形态为何,,它们本质上的差异主要体现在减速器层面,是采用行星减速器、谐波减速器,还是行星滚柱丝杠等其他类型的减速器,甚至在灵巧手上,也可能采用蜗轮蜗杆结构。这种减速器类型的多样性,导致了关节在性能表现上的显著差异。
宇树这类能够完成后空翻、奔跑等高难度动作的机器人,多采用行星减速器方案,这是一种全信息处理的高效方案。其优势在于高效能、快速响应以及强大的运动能力。而我们团队所构想并已实现的方案,采用的是谐波减速器方案。该方案的核心优势在于轻量化与高精度,同时在发热控制上,可能仅为行星方案的四分之一。因此,我们认为,对于未来的作业型机器人而言,谐波减速器方案将是其必备之选。在当前阶段,我们并不认为存在一种绝对能在未来产生巨大影响的唯一方案。相反,我们认为这些方案更可能是并行发展的,根据客户的具体应用场景,会有不同的适配选择。
图源:演讲嘉宾素材
Figure AI近期发布的Helix模型,在某种程度上,可以被视为具身智能的ChatGPT1.0时代,尚未进化到2.0或3.0阶段。我们观察到,国内已有与He'lix类似架构的模型出现,甚至在某些方面领先于它。
我们预测,在今年或者明年,真正的ChatGPT级别的具身智能模型可能会出现,甚至有可能不是ChatGPT级别,而是DeepSeek级别。我们对国内在硬件和软件层面都抱有信心。硬件方面的优势尤为明显。这主要得益于我国整个产业链的快速发展。相比之下,在国外进行机器人研究,从获取硬件到开展研究,整个周期可能要比国内长三到五倍。
我们认为未来的全新产业链将细分为五个关键部分。首先,能源板块至关重要,它关乎如何实现更高的能量密度。当前,机器人的续航能力普遍仅为一至两小时,这显然难以满足实际应用需求。因此,提升能量密度成为了亟待解决的关键问题。
其次,关节层面同样不可忽视。我们正致力于此,力求提高关节的良品率,达到类似于宁德时代在电池领域所实现的极高良品率水平,从而实现大规模生产。
第三,感知层面也极为重要。这涵盖了激光雷达、相机、传感器,以及触觉力传感器等关键组件。它们对于机器人的感知与交互能力至关重要。
第四,就是算力层面,未来端侧的推理算力需求并不会太高,因此国内的机会也很多。
最后,我们认为未来的机器人将呈现出多场景、多形态的特点。这意味着,专业的机器人服务商将在运营单一场景方面发挥关键作用。他们拥有专业场景的数据资源、运维能力以及迭代升级的能力。这些是目前无论是人形机器人厂商还是协作臂厂商都难以触达的领域,但却是未来不可或缺的一环。
(以上内容来自钛虎机器人产品及生态负责人谌威于2025年3月13日在第三届具身智能机器人产业发展论坛发表的《先进电驱平台加速智能具身》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202503/20I70421040C106.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921