盖世汽车讯 精确的物体姿态估计是指机器人同时确定物体的位置和方向的能力。这对机器人技术十分重要,尤其是在对制造和物流等行业非常关键的拾取和放置任务中。随着机器人承担的复杂操作任务越来越多,它们日益需要具有精确确定物体、位置和方向的六个自由度(6D姿态)的能力,以确保能够以可靠和安全的方式与物体进行交互。尽管深度学习取得了进步,但6D姿态估计算法的性能在很大程度上取决于其训练数据的质量。
(图片来源:芝浦工业大学)
据外媒报道,在由日本芝浦工业大学(Shibaura Institute of Technology)副教授Phan Xuan Tan领导一项新研究中,研究人员引入精心设计的数据集,旨在提高6D姿态估计算法的性能。该数据集通过提供全面的资源,允许机器人在现实环境中以更高的精度和适应性来执行任务,从而弥补机器人抓取和自动化研究中的主要空白。该团队还包括来自河内工业大学(Hanoi University of Industry)和河内理工大学(Hanoi University of Science and Technology)的研究人员。
芝浦工业大学副教授Phan Xuan Tan表示:“研究人员的目标是创建一个数据集,不仅可以推进研究,而且可以解决工业机器人自动化方面的实际挑战。我们希望它能为研究人员和工程师提供宝贵的资源。”
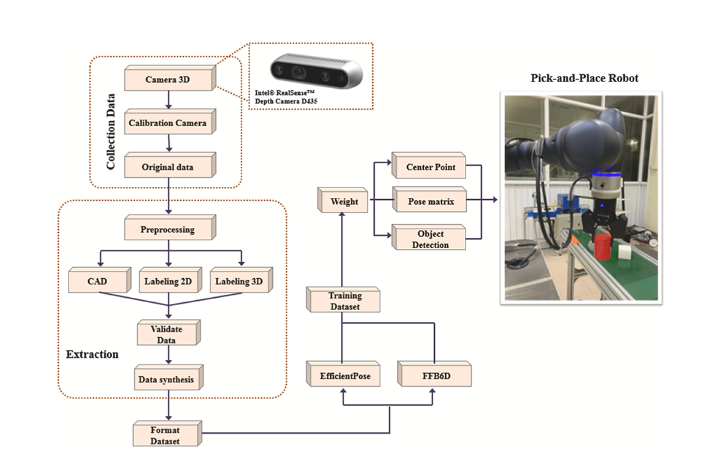
该团队创建的数据集不仅可以满足研究社区的需求,而且适用于实际的工业环境。使用Intel RealSense depth D435摄像头,它们可以收集优质RGB和深度图像,并通过物体6D姿态数据旋转和平移分别进行注释。该数据集具有各种形状和大小的特征,并添加了数据增强技术以确保其在不同环境条件下的多功能性。这种方法使该数据集高度适用于广泛的机器人应用。
Tan副教授表示:“该数据集经过精心设计,适合各个行业。它包含具有不同形状和环境变量的物体,不仅为研究人员提供了宝贵的资源,也使相关领域(机器人需要在动态和复杂条件下运行)工程师受益。”
通过最先进的深度学习模型EfficientPose和FFB6D进行评估,该数据集分别达到了97.05%和98.09%的准确率。这证明它可以提供可靠和精确的姿态信息,对于机器人操作、制造业质量控制和自动驾驶汽车等应用十分重要。这些算法在数据集上的强大性能,突显了对需要精确度的机器人系统进行改进的潜力。
Tan副教授表示:“该数据集包括一系列基本形状,包括长方体、梯形和圆柱体。对其进行扩展以包含更复杂和不规则的物体,将使其更适用于现实世界的场景。Intel RealSense Depth D435摄像头可以提供出色的深度和RGB数据,但该数据集对它具有依赖性,无法使用相同设备的研究人员可能访问受限。”
尽管存在这些挑战,但研究人员对该数据集的效用持乐观态度。结果表明,良好的数据集设计可以明显提高6D姿态估计算法的性能,从而支持机器人以更高的精确度和效率执行更复杂的任务。展望未来,通过整合更广泛的物体和自动化部分数据收集过程,该团队计划扩展数据集,以使其更高效和易于访问。他们希望进一步增强该数据集的适用性和实用性,使依赖于机器人自动化的研究人员和行业受益。

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202501/22I70416979C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921