在新能源技术推动下,电动化越野车型不断涌现,成为市场新宠。2024年11月28日,在第五届汽车电驱动及关键技术大会上,东风猛士汽车科技电驱动专家张蕾指出,电驱动控制系统作为新能源技术的核心,其可靠性和安全性是行业发展的关注焦点。因此,进行功能安全设计显得尤为重要。
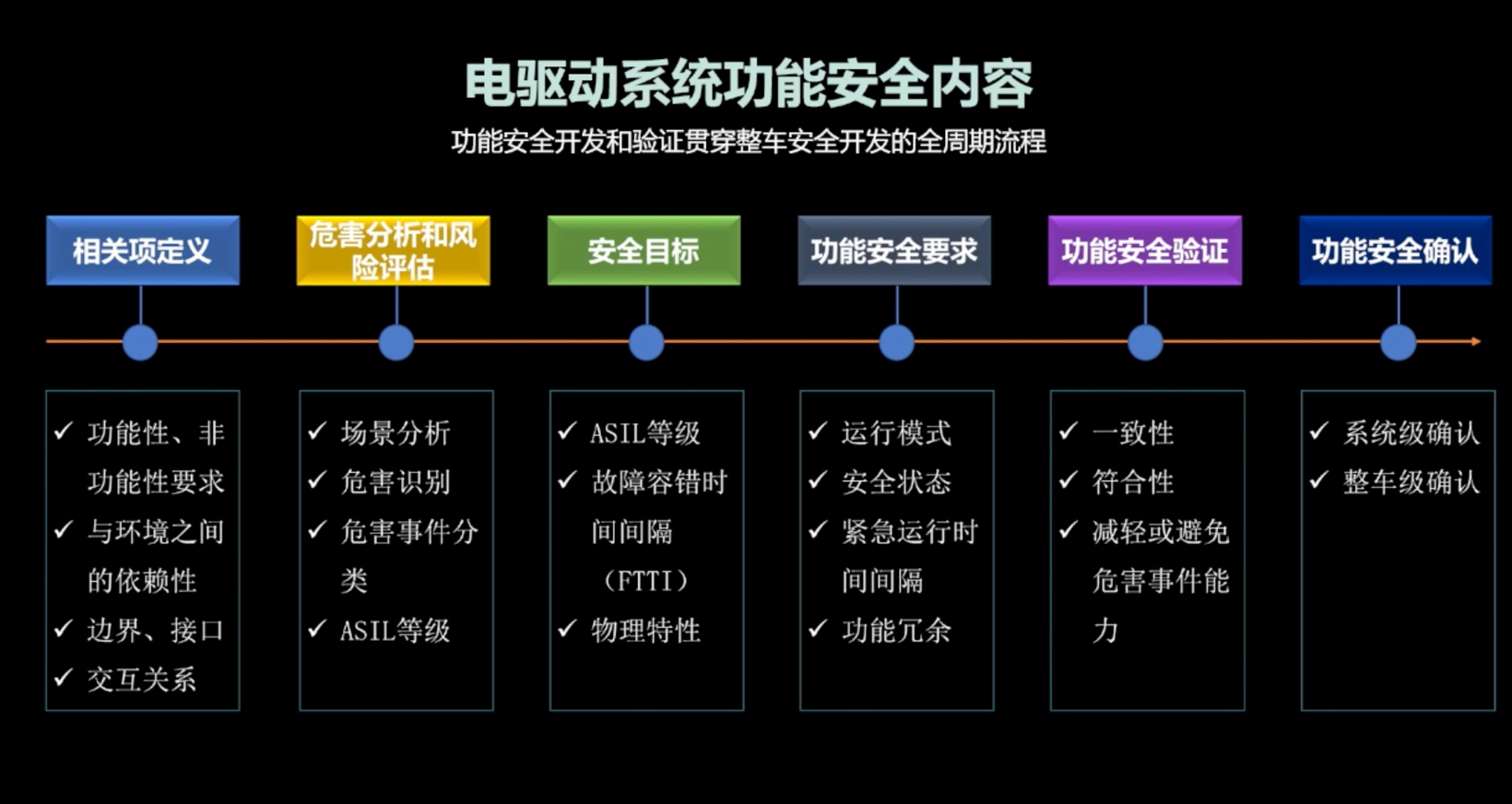
张蕾详细阐述了电驱动控制系统功能安全开发的内容。她提到,功能安全开发包括相关项定义、危害分析、安全目标设定、功能安全要求、功能安全验证以及功能安全确认六个部分。张蕾还介绍了电驱动控制系统的主要功能,基于这些功能所制定出系统安全目标。她以扭矩控制失效为例,展示了技术安全要求分析的过程。
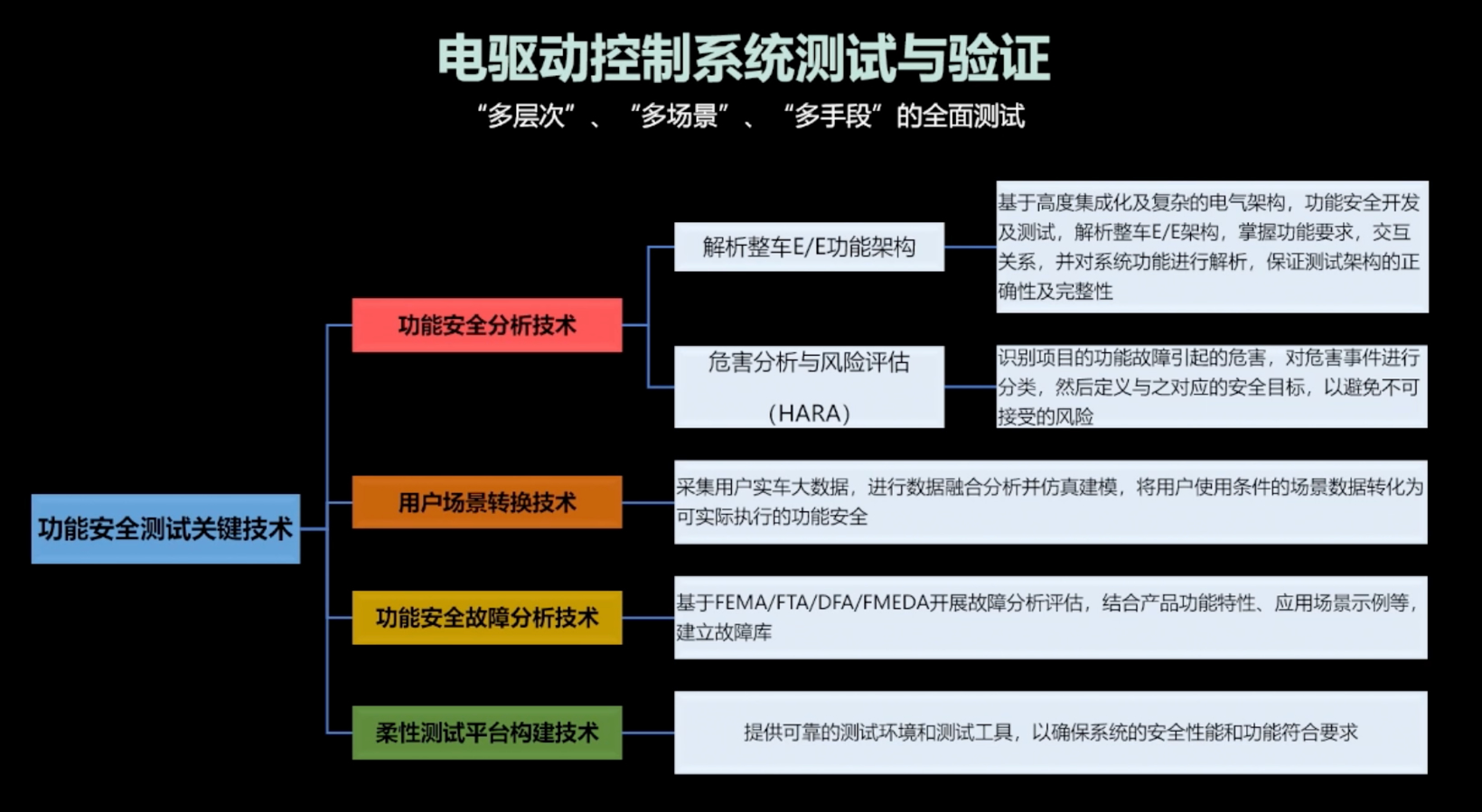
张蕾表示,功能安全的测试验证包括功能安全分析技术、用户场景转换技术、功能安全故障分析技术以及柔性测试平台构建技术等四个方面。通过HiL测试和多域融合的整车测试,可以验证功能安全目标是否达成。她还展示了电驱动控制系统在整车功能安全测试中的实际应用案例,进一步证明了功能安全设计的重要性和有效性。

张蕾 | 东风猛士汽车科技电驱动专家
以下为演讲内容整理:
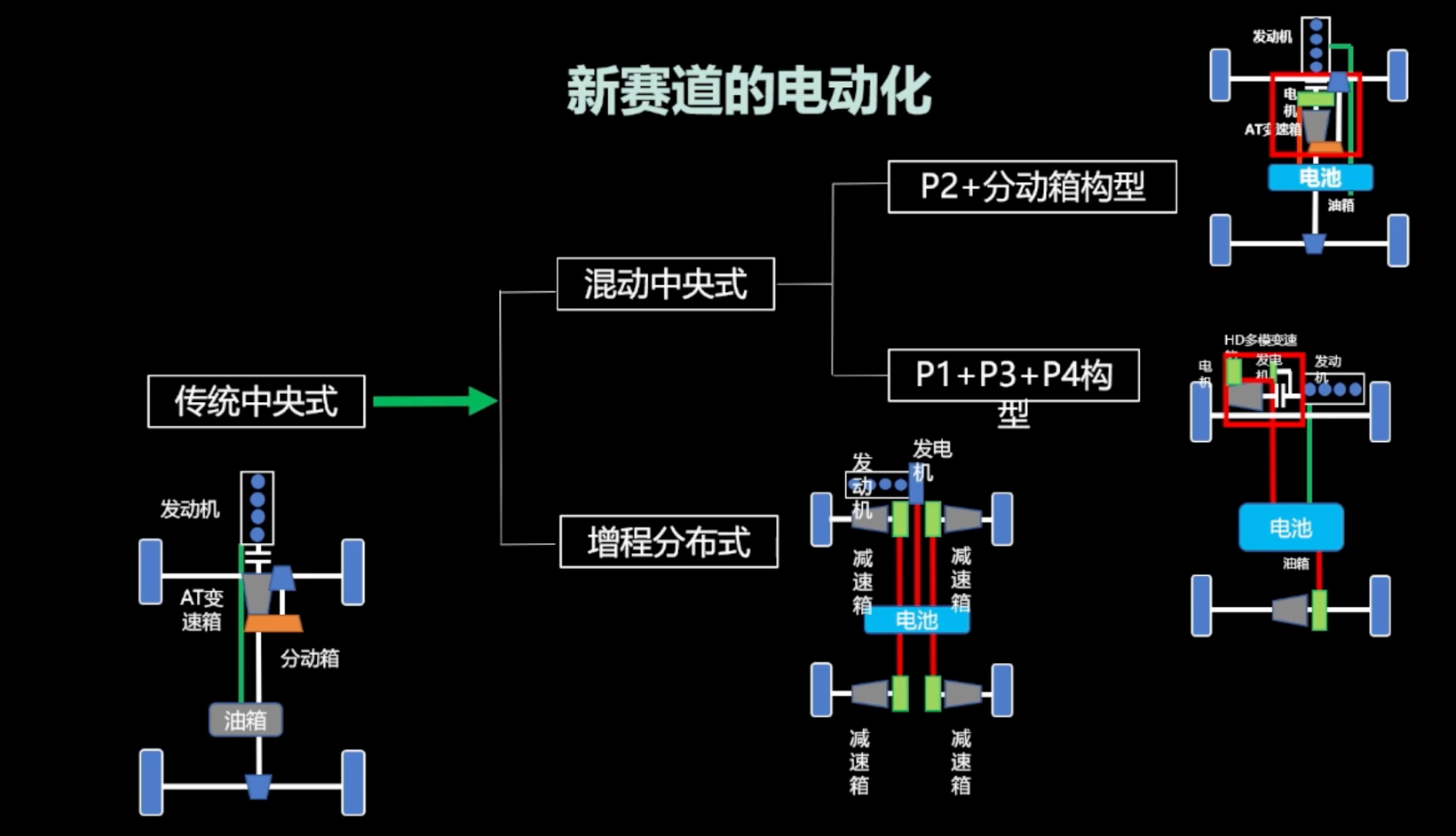
新赛道的电动化
近年来,随着消费者对越野车型需求的持续上升,全球越野汽车市场迎来了前所未有的发展机遇。2022年-2024年,市场上新增的越野车型达到了19款。截至2024年第三季度市场上与越野相关的车型总数已经达到了33款,中国的自主品牌展现出了尤为显著的发展势,在这33款车型中,有27款均源自中国的自主品牌。
新能源技术正在加速赋能越野领域,随着新能源技术的不断进步,新能源技术正加速替代越野领域传统的机械四驱系统和低速高扭矩大排量发动机方案。
图源:演讲嘉宾素材
新赛道下的电动化趋势下,可以明显看到传统的中央式驱动系统正逐步向混动中央式和增程分布式系统演变。在电动化发展的新路径上,我们的电驱动控制系统正朝着提升动力性能与经济性能的方向不断优化。
在汽车技术不断发展的过程中,安全性始终是行业非常关注的课题。作为新能源技术的核心组成部分,电驱动控制系统承担着电能与机械能转换的关键角色,其可靠性和安全性更是成为了整个行业发展的关注焦点。功能安全的开发与电驱动系统开发一样,也遵循着从需求到产品的正向开发流程,这一流程伴随着系统开发与整车开发的全生命周期。电驱动系统功能安全概念及实现
道路车辆功能安全ISO 26262-1:2018、国标GB 34590-2017对功能安全都提出了明确的管理及开发的要求,,功能安全开发在流程上主要划分为以下六个关键阶段:相关项定义、危害分析、安全目标、功能安全要求、功能安全验证,以及功能严重性的确认。在电驱动控制系统的功能安全开发实践中,我们严格遵循这一流程,逐步且系统地开展电驱动控制系统的功能安全开发、验证及测试确认工作。
图源:演讲嘉宾素材
基于电驱动控制系统的功能特性、应用场景以及危害分析的深入研究,我们可以明确电驱动控制系统的系统安全目标,这些目标主要聚焦于扭矩管理和高压管理两大方面的功能安全。在完成功能安全目标的设定后,我们进一步对电驱动控制系统的功能安全提出具体要求。考虑到其子系统中TCU与MCU所承担的功能存在差异,我们分别针对TCU和MCU制定了相应的系统安全要求,并为每一项安全要求设定了ASIL等级.在确立了系统功能安全要求之后,关键在于如何实现这些安全要求的落地实施。
以扭矩控制失效情况下,基于对电驱动控制系统安全架构的分析,以及对安全状态条件、安全机制和安全状态的深入剖析,我们得出扭矩控制失效情况下需制定的安全机制包括两项:一是主动短路或关闭IGBT,或零扭矩控制;二是报故障。
同理其他失效模式分析,我们会把这些技术安全要求相应分配到软件或硬件架构上,分别由硬件或软件实现这些安全技术的要求。
电驱动控制系统功能安全测试验证
在完成系统功能安全的实施后,验证功能安全目标是否得以实现成为关键环节。功能安全测试的核心技术涵盖以下四个方面。功能安全分析技术,用户场景转换技术功能安全故障分析技术和柔性测试平台构建技术电驱动控制系统功能安全的系统测试和验证是我们基于功能安全四个方面的关键测试技术来展开的。
图源:演讲嘉宾素材
首先,我们会对电驱动控制系统的单体及级联进行HiL测试,通过故障注入的方式,对系统的安全响应及状态进行严格的验证。通过对应于技术安全要求的测试用例逐一验证安全响应及状态是否达到预期的安全要求。。
电驱动控制系统并非孤立地存在于整车之中,而是与其他多个域实现了多域融合。因此,在完成针对电驱动控制系统的HiL测试之后,我们还需进一步对多域融合的功能安全进行整车级别的测试。主要包括驱动安全响应、高压安全以及横向稳定性等方面的测试。这些测试旨在将电驱动控制系统在整车运行过程中所承担的功能与其他车载系统进行联合整车测试。
随着整车各系统功能安全开发实践的深入,我们已不仅仅局限于电驱动控制系统,而是针对整车所有控制系统,总结出了功能安全开发的全景图。这一全景图基于各系统功能、整车开发流程以及ISO26262标准,提炼出了功能安全开发的标准化V流程(下图烦请删除)。通过V流程,我们确保了功能安全开发的每一个环节都能得到细致分解与有效落实,同时借助全面的测试手段,验证了功能安全目标的实现情况。这一过程不仅保障了整车功能安全目标的顺利达成,也确保了整车能够符合最初设定的功能安全要求。
(以上内容来自东风猛士汽车科技电驱动专家张蕾于2024年11月27日-28日在第五届汽车电驱动及关键技术大会发表的《电驱动控制系统功能安全设计》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202412/5I70412559C106.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921