
盖世汽车讯 据外媒报道,福特汽车公司(Ford Motor)为一项远程停车控制功能申请了专利,且可能将其用于未来的福特电动汽车。该专利于2021年6月28日申请,2024年10月8日公布,分配序列号为12110022。
(图片来源:USPTO)
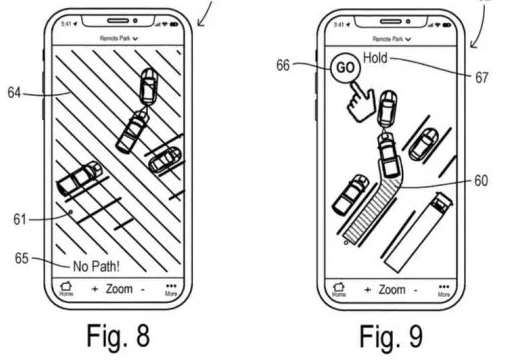
福特在专利中指出,未来电动汽车在被拖车时可以通过空中充电系统充电。如果能够实现的话,这就需要使拖车方法更容易、更快捷一些。因此,该公司提议采用远程停车控制功能,利用摄像头来收集电动汽车的图像,并将其传输到智能手机或其他设备上,同时通过覆盖图来引导拖车操作员进入最佳位置,以精确地做到这一点,而无需下车。
专利中提到,电动车辆通过拖曳装置耦合在一起,用于空中能量传递。遥控停车系统通过车载摄像头收集图像,以生成360°架空直播图像,并显示在与车辆控制器相连的智能手机上。智能手机上的用户界面(UI)接受用户对流媒体图像(显示车辆处于起始位置)的第一次触碰,以便指定机动端点。控制器计算转向操作序列,以创建到达终点的路径。UI将计算路径显示为实时图像上的覆盖图。UI响应触摸屏上的第二次触碰输入而产生激活信号,并在第二次触碰输入期间将激活信号转发给车辆控制器,只有在用户保持第二次触碰输入的情况下,才会按照执行器的命令移动车辆。
事实上,该系统在确保要拖的车辆停在停车位后,可以向拖车驾驶员显示相当多的信息。在此之后,它可以使用一系列摄像头和传感器来适当规划路径,拖车也可以自动移动到合适的位置。无论如何,这确实是一个有趣的想法。
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/news/202410/12I70407318C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921













