盖世汽车讯 据外媒报道,美国宾夕法尼亚州立大学工程学院(Penn Engineering)的学生们推出一款全尺寸电动自动驾驶卡丁车——AV4EV。该车不仅支持多种灵活的传感和计算功能,还能够搭载一名人类驾驶员以收集额外的数据。
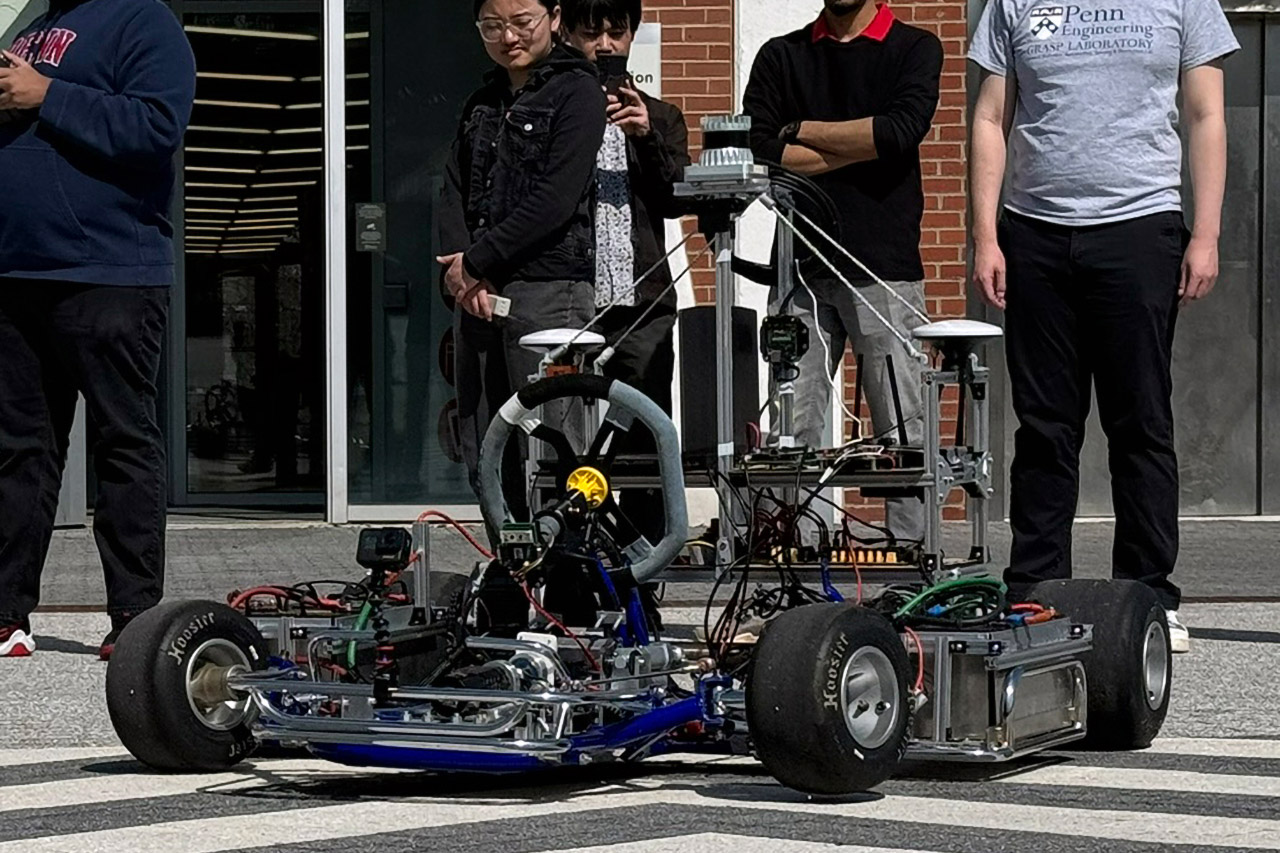
自动驾驶卡丁车AV4EV(图片来源:宾夕法尼亚州立大学工程学院)
背景
随着人们对感知、定位、规划、控制和预测等自动驾驶相关模块进行了广泛研究,深度学习(DL)和模仿学习(IL)等人机协同端到端(human-in-the-loop end-to- end)方法对于实现安全关键操作方面仍存在尚未解决的挑战。一方面,模块化算法设计的问题在于系统中的每个单独模块可能并不知道所需的“高层次”任务,从而导致信息遗漏和协调不足。而端到端法会将自动驾驶系统视为一个整体,直接将原始传感器的输入信息映射为控制端(油门、转向、制动)输出信息。此种方法不仅在赛车领域具有优势,还可以扩展至有意义的实际道路应用中。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202408/15I70401978C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921