盖世汽车讯 据外媒报道,美国西北大学(Northwestern University)的工程师们开发出新型柔软、灵活的装置,可以通过伸展和收缩使机器人移动——就像人类的肌肉一样。
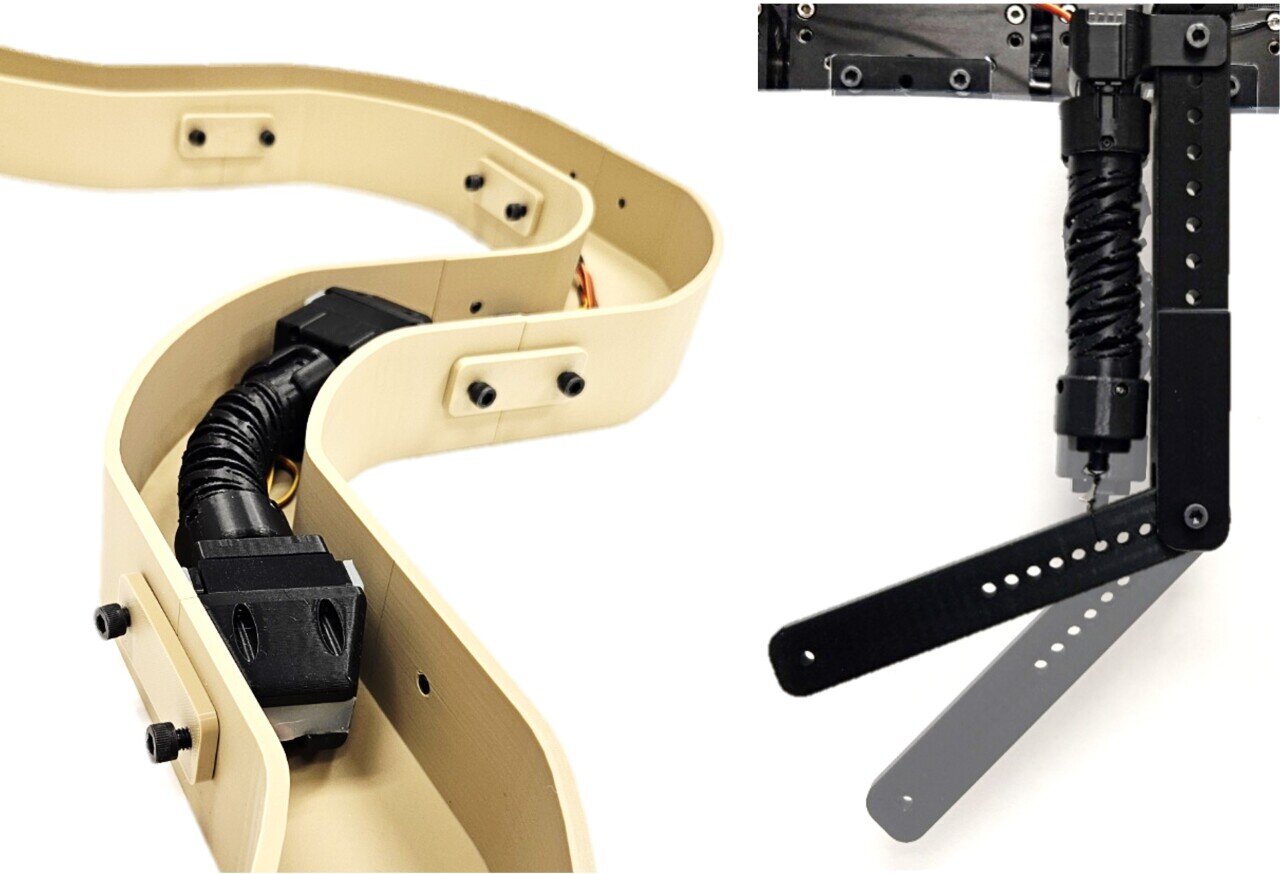
图片来源:西北大学
为了展示新装置(称为执行器),研究人员用它来制造一个圆柱形、蠕虫状的软机器人和一个人造二头肌。在实验中,圆柱形软机器人在狭窄的管道状环境中沿着急弯方向移动,而二头肌能够连续成功举起500克的重物5,000次。
由于研究人员使用普通橡胶3D打印了软执行器的主体,因此最终的机器人材料成本约为3美元,不包括驱动执行器形状变化的小型电机。这与机器人中使用的典型刚性执行器形成了鲜明对比,因为刚性执行器通常要花费数百至数千美元。
研究人员表示,这种新型执行器可用于开发廉价、柔软、灵活的机器人,这些机器人更安全,更适合实际应用。相关研究于7月8日发表在期刊《Advanced Intelligent Systems》。
“机器人专家长期以来的目标就是让机器人更安全,”该研究领导者、西北大学Ryan Truby之一表示。“如果软机器人撞到人,伤害不会像被坚硬的机器人撞到那么大。我们的执行器可用于更适合以人为中心的环境的机器人。而且,由于它们价格低廉,我们有可能实现更多地使用。”
西北大学麦考密克工程学院材料科学与工程和机械工程的June and Donald Brewer初级教授Truby负责指导机器人物质实验室(The Robotic Matter Lab)。Truby实验室的博士后学者、论文第一作者Taekyoung Kim共同领导这项研究。机械工程博士生Pranav Kaarthik也参与了这项工作。
“行为和移动像生物体”的机器人
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202407/12I70398755C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921