蔚来汽车自2017年起在NT1.0平台上针对智能驾驶发力,2020年10月推出了全国首个高速领航功能,NT2.0平台于2022年发布,全系标配1016 TOPS智能驾驶算力和包括激光雷达在内的33个高性能感知硬件,为消费者带来更安全、便捷的出行体验。
2024年5月23日,在第七届智能驾驶与人机共驾论坛上,蔚来汽车高级总监、资深算法专家、自动驾驶研发规划与控制团队负责人秦海龙介绍,辅助驾驶存在NOA、NOP等多种命名,蔚来的一代方案名为NOP,二代进阶为NOP PLUS,即NOP+,其核心在于“全域”和“全量”。
“全域意味着打破传统ODD概念的局限,实现了从高速到城区再到低速的全面覆盖,构建了一体化的智能驾驶架构。全量则表明,自今年4月30日起,蔚来通过Banyan·榕智能系统,将高阶智驾功能作为全系标配,全面释放给用户。”

秦海龙|蔚来汽车高级总监、资深算法专家、自动驾驶研发规划与控制团队负责人
以下为演讲内容整理:
蔚来当前自动驾驶情况介绍
辅助驾驶存在NOA、NOP等多种命名,蔚来的一代方案名为NOP,二代进阶为NOP PLUS,即NOP+,其核心在于“全域”和“全量”。全域意味着打破传统ODD概念的局限,实现了从高速到城区再到低速的全面覆盖,构建了一体化的智能驾驶架构。全量则表明,自今年4月30日起,蔚来通过Banyan·榕智能系统,将高阶智驾功能作为全系标配,全面释放给用户。
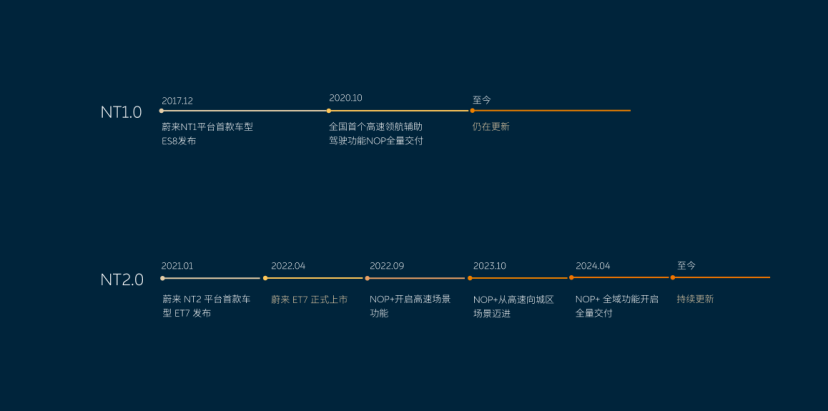
蔚来始终秉持着创始人李斌先生于2017年提出的愿景:解放时间,减少事故,并在今年提出新的愿景:解放精力、减少事故。在技术演进方面,自2017年起便在一代平台上全面更新智能驾驶技术,并于2020年10月推出了全国首个高速领航功能。至今,一代平台仍在持续更新中。
蔚来的商业模式以软件驱动为核心,为用户提供持续更新的智能驾驶和座舱软件服务。今年上半年,针对一代平台正式推出了订阅付费模式,用户可根据需要选择按月支付智能驾驶软件费用或选择买断方式,这一模式在国内已开始广泛推广。
图源:演讲嘉宾素材
自2017年起,蔚来致力于智能驾驶的研发与迭代。智能驾驶作为通用智能的典型应用,其发展与模型演进密切相关,数据和算力始终是其核心。特斯拉之所以能保持行业领先地位,得益于其强大的数据驱动能力。蔚来也在这方面进行了大量投入,截至目前,从NT1到NT2平台,已累计超过9.5亿公里的智能驾驶里程数据,且每日仍在快速增长。
蔚来NT2.0平台于2022年发布,全系标配智能驾驶算力与数据功能。在智能驾驶发展的关键节点上,2022年9月实现了高速场景的交付,并基于高速城区一体化架构,今年4月30日启动了全域、全量交付。
全域领航下一步发展计划及技术路线
关于全域的概念,近年来行业在ODD的释放上展现了多样化思路。特斯拉率先在全球范围内推广ADAS,采用纯视觉技术并逐步实现无图驾驶。而在国内,众多新势力在2017、2018年通过利用高精度地图在高速场景取得领先,超越了特斯拉的表现。蔚来沿袭这一方案,并扩展至城区驾驶。
对于城区驾驶,用户关心的不仅是开放了多少城市,更重要的是实际可用的驾驶里程。随着软件版本的迭代,释放的里程如何验证成为关键。蔚来坚持软件的安全性与其功能释放的紧密绑定,通过持续迭代和确保安全,实现了广泛的验证范围,在功能开发和验证上同样投入精力。
另外,蔚来聚焦于用户体验和驾驶安全,提出了明确的迭代目标。这涉及车云一体的技术架构,以及面对用户的软件释放。从技术角度看,我们关注算法的持续迭代以及迭代后的有效释放,确保技术不断进步并为用户带来实际价值。
在蔚来智能驾驶的演进中,有几个核心要素需特别强调:场景、功能及有无地图的统一性。摒弃了传统ODD的划分,采用统一架构来设计自动驾驶功能,实现了城区与高速场景下功能的无缝衔接。地图在自动驾驶中扮演着重要角色,通过解决地图信息与现实信息的冲突和一致性问题,实现了有图无图的统一,为自动驾驶提供了更丰富的信息增量。
群体智能是蔚来实现大规模验证和释放的关键。通过云端和车端的大算力平台,蔚来实现了基于用户真实场景的验证,并建立了场景库以控制风险。这包括软件本身的迭代和云端的持续运营两个主要手段。
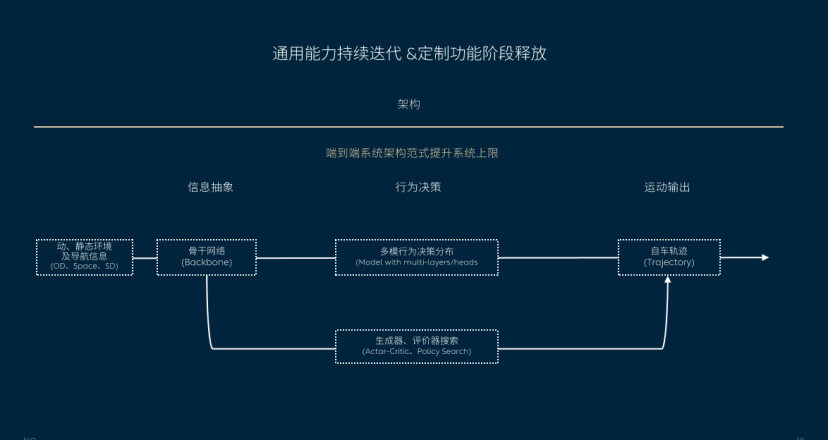
在通用能力方面,蔚来关注静态环境下的驾驶连续性、中长时距下的驾驶可达性以及近时距内的驾驶类人性。为实现这一目标,打破了传统ODD的分割,将不同场景抽象为静态环境、动态环境及导航信息的表达。驾驶单元通过数据驱动,持续优化驾驶目标和驾驶空间,确保驾驶的连续性和安全性。

图源:演讲嘉宾素材
在软件迭代能力上,具备丰富的数据和学习能力。正向数据和负样本的结合提供了模仿加强化学习的迭代范式,持续增强系统的泛化能力。这一迭代过程不仅关注网络架构的更新,更强调整体系统的优化和提升。
在智能驾驶领域,蔚来特别关注动静态信息、导航信息的融合,通过骨干网络实现多模行为。这一过程中,模仿学习是基础,而强化学习则通过整体反馈优化负样本学习。人类驾驶行为作为正向模仿的标签,指导系统学习如何优质驾驶;同时,收集正负向数据确保学习的全面性。
图源:演讲嘉宾素材
蔚来的目标是通过学习达到覆盖出行场景、实现类人驾驶、确保短时距下的安全表现。为此,蔚来即将在Q4推出两大特色功能:点到点智能驾驶和离车自主换电。点到点智能驾驶旨在解决用户日常通勤中的“最后一公里”问题,通过连续无切换的驾驶体验,展现一体化架构的优势。而离车自主换电则是蔚来独有的技术,实现无人化自动换电体验。
此外,蔚来云端智驾里程的覆盖也在持续更新,用户可以通过蔚来智能驾驶地图页面实时查看。这背后是车端软件能力的提升和群体智能验证的释放逻辑,共同推动着蔚来智能驾驶技术的不断进步!
(以上内容来自蔚来汽车高级总监、资深算法专家、自动驾驶研发规划与控制团队负责人秦海龙于2024年5月23日在2024第七届智能驾驶与人机共驾论坛发表的《蔚来NOP+全域全量方案》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202405/30I70394017C106.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921