2015年,零跑汽车由大华股份及其创始人投资成立。主营业务包括新能源整车设计开发、制造及销售,核心技术涵盖自研整车架构、电子电气架构、电池架构、电驱架构、智能网联系统、智能驾驶。零跑汽车地图定位算法负责人黄栋泽表示,我们的愿景是成为一家受人尊敬的世界级的电动车企。依托软、硬件全部自研,我们可以实现未来自动驾驶进阶的快速迭代。
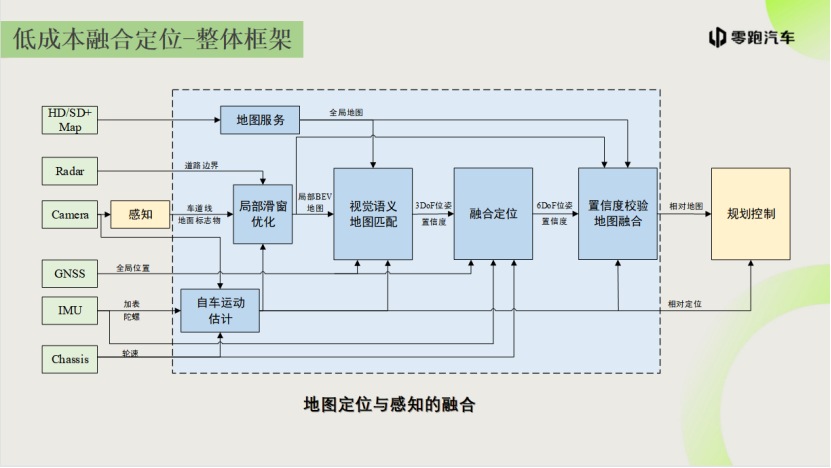
同时黄栋泽表示,目前,行业面临着硬件成本降低,地图依赖减轻,地图定位算法复杂度增加的痛点。我们认为未来的解决方案是SD Pro地图。此外,我们将地图定位与感知融合,搭建低成本融合定位-整体框架,包括GNSS、局部滑窗优化、视觉语义地图匹配等。

黄栋泽 | 零跑汽车地图定位算法负责人
以下为演讲内容整理:
零跑汽车2015年由大华股份及其创始人投资成立,主要业务是新能源整车设计开发、制造及销售。
零跑汽车坚持全域自研,核心技术是自研整车架构、电子电气架构、电池架构、电驱架构、智能网联系统、智能驾驶。愿景是成为一家受人尊敬的世界级电动车企。
在智能驾驶方面,零跑整合了全部资源,从芯片到感知硬件、从域控到算法,实现全场景基于中国特色路况和驾驶习惯的智慧领航;在硬件方面,零跑采用了28个高阶智能传感器,实现了23个智能辅助驾驶功能。零跑拥有自研的摄像头、毫米波、超声波、芯片、组合导航。未来新款车型将会应用激光雷达、orin芯片和800万高清摄像头;在软件方面,零跑构建了超算存储中心和数据闭环管理系统。在算法方面,零跑获得了多项竞赛榜第一。依托于软硬件全栈自研,在未来自动驾驶进阶路上,零跑可以实现快速迭代。
高精度地图定位对L2+以上智能驾驶来说,是非常关键的支撑。高级别智能驾驶需要具备全场景点到点的地图定位能力,既包括高速,也包括城区和停车场。高精定位需要提供准确的6自由度位置让下游感知和规控。通过高精定位,结合高精地图,获取车身周边的道路元素及道路突破结构,可以很好地辅助智能驾驶实现,通过高精定位和地图辅助感知,提升检测和跟踪能力。然而,要实现全场景地图定位还具有极大挑战,包括城市峡谷、匝道汇入口、复杂JCT隧道和多层停车场等场景。
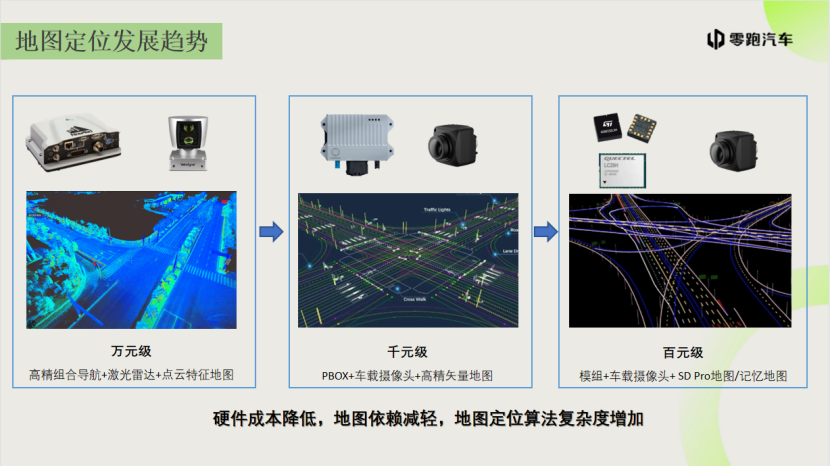
地图行业面临着两个痛点,定位硬件成本过高,对地图依赖过强。纵观整个地图定位发展历史,就是成本不断降低,地图依赖不断减弱的过程。
图源:嘉宾演讲材料
未来地图定位的成本一定还会继续下探,到百元左右,利用强大的中央域控做集成。将硬件要求降低,算法复杂度提升,比如做基于模型的IMU降噪、在线标定和温补等,最后结合视觉信息来实现高精度地图定位。最终实现成本变化。
在地图方面,未来非常可行的方式是sd pro地图,相对高精地图,元素更轻,精度较低,但更新和覆盖范围更适合城市智能驾驶;还有一种方式是不再需要高精地图,在车端做记忆地图。
图源:嘉宾演讲材料
因此,零跑升级了融合定位架构,利用原始的IMU和GNSS、视觉语义、毫米波雷达对环境的感知,再结合图上提供的HD/SD map实现整体融合定位框架。这个框架具有三个特点,第一,零跑构建了相对定位坐标系,好处是相对于全区坐标系更加平滑稳定,不受外界GNSS环境干扰,零跑的感知和规划都基于这个相对坐标系来完成计算;第二,建立了以视觉定位为主的多源信息融合定位的系统框架,视觉定位相较于GNSS定位,在局部范围内更稳定,零跑通过视觉提取语义信息构建了局部地图,将这个局部的BEV map与全局高精地图进行匹配,得到视觉定位结果,这种方法可以解决长隧道等场景下的问题;第三,零跑开发了感知和地图相互校验的融合框架,这个地图与真实场景下的地图是相同的,我们的车在真实环境中获得了真实的感知信息,将BEV局部地图与获取到的车身周边高精地图进行融合,以实时感知的BEV地图为锚点把握,弥补高精地图可能出现的异常情况,例如变化场景、车道线折叠等。通过新架构,零跑实现了低成本的融合定位,拓展了零跑在高速高架上的领航服务范围,降低了对高精地图的依赖。
这样的好处是可以比较平稳地通过匝道和隧道,即使GNSS退化到了单点定位,以视觉定位为主的方案也不会受到影响。进入隧道后,利用视觉来修正,效果优于传统的融合算法,保证了隧道场景下NOA的可用性。
图源:嘉宾演讲材料
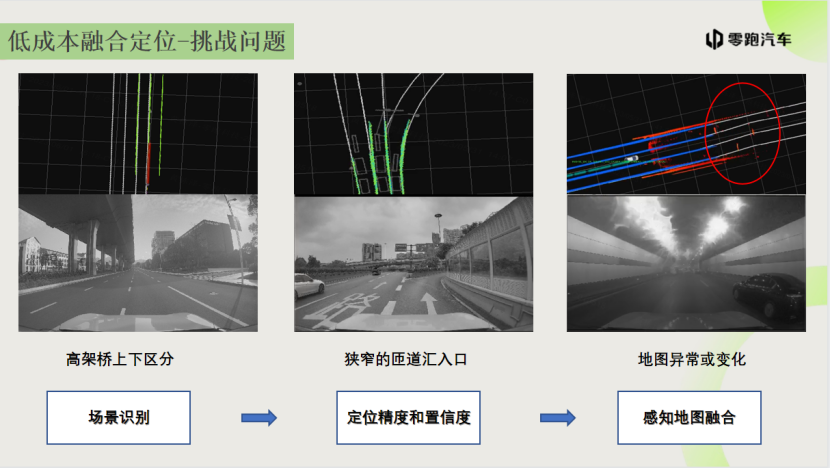
在实际落地环境中,零跑遇到了许多挑战,例如上下高架桥的区分,即在高架桥下行驶时,无法获取高架桥上的高精地图,可能会出现错误匹配;在狭窄匝道的出入口,尤其是在隧道出现后,立即转入匝道;还有一个典型问题是高精地图会出现问题,例如发现某些路段高精地图出现了明显的折线。如果不加处理,直接将折线对应的reference line交给规控,可能会引起严重安全问题,如大方向盘问题。因此,需要从定位精度和定位置信度上解决这些问题,零跑通过感知和地图融合,将车道线变成直线,并通过直线与折线进行融合,使折线更多,从而避免原高精地图出现的折叠情况,进行磨平。
在高速上,零跑引入了毫米波雷达进行定位,例如在极端雨雾天气或车道线磨损的地方,通过毫米波与路边界匹配,得到很好的定位结果。在频繁的高架遮挡、大车遮挡下,GNSS定位结果会出现非常明显的漂移,但是通过零跑构建的局部地图与高精地图匹配仍然能实现比较好的定位。
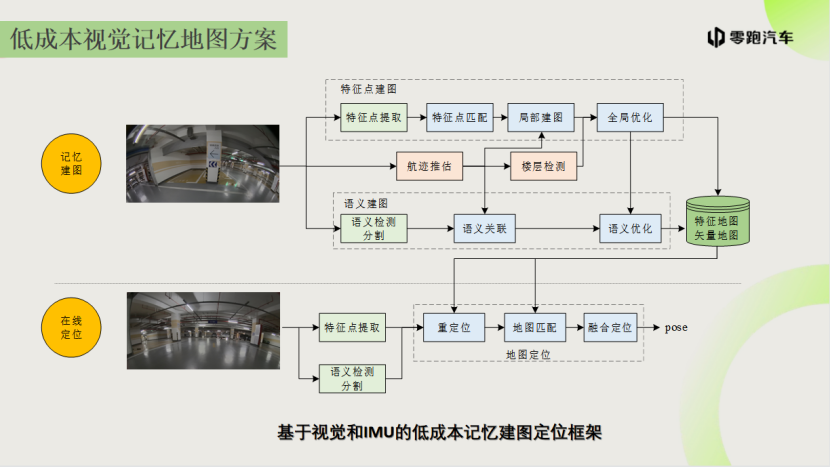
通过新的融合定位架构,零跑解决了定位成本问题,并部分降低了对高精地图的依赖。要完全去除对高精地图的依赖,可行方案是记忆建图。
图源:嘉宾演讲材料
第一次通过场景进行记忆,第二次就相当于已经有了一个地图来辅助智能驾驶。对于用户来说,80%的路线都是固定的。
首先,零跑采用纯视觉方案,利用智能环视摄像头或部分行车摄像头进行记忆地图绘制,并在自车本地存储,这样以较低的成本,通过视觉提取出的特征点和语义信息进行联合建图,生成特征地图和矢量地图。有了这些地图后,零跑进行在线定位、地图匹配和融合定位,完成整个智能驾驶功能。零跑的航迹推估算法也做了很多处理,采用了没有经过转台标定的IMU,只做简易标定,并在行车过程中,使用在线学习的方式,对IMU、底盘、图像相关都进行了在线估计,包括传感器的安装误差角、轮速刻度系数、IMU温漂等,把误差估计出来,保证最终整体的定位精度,在泊车时快速进行补偿。目前零跑用非转台标定的IMU,结合轮速脉冲和视觉,在泊车场景下也能够做到千分之五的水平。
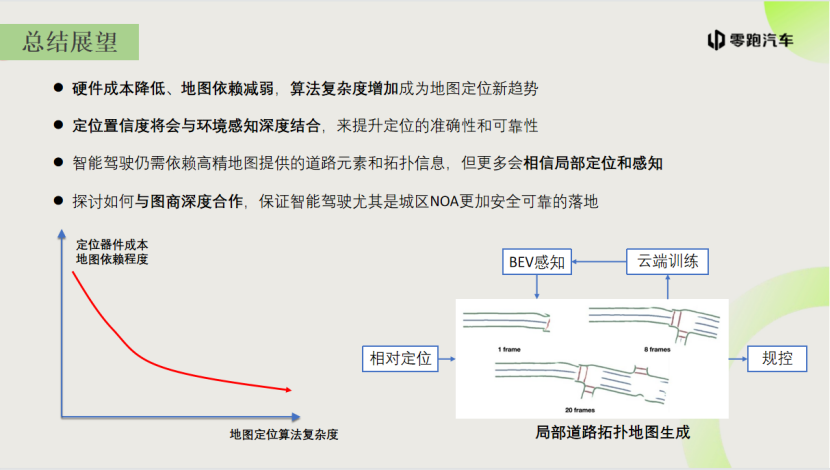
目前研究的热门方向利用BEV+Transformer的端到端的高精地图生成来提升感知能力,降低对高精地图的依赖。实际上就是将原来的离线建图和高精地图生产流程通过大模型在车端进行实现,对增值数据的要求非常高,需要海量数据来训练大模型。因此,零跑在云端搭建了一个设计标注流程。通过量产车采集到的局部点名和图片信息,对采集到的点云进行三维重建,在三维重建的地图上进行矢量标注,生成矢量信息,然后将标注完的结果反投到图像上,进行模型训练。通过4D实地标注流程,逐渐提升在BEV全方面的大模型表现。
总结
图源:嘉宾演讲材料
硬件成本降低、地图依赖降低、地图定位算法复杂度增加已成为地图定位的新趋势;定位置信度与环境感知密切关联,评判地图定位好坏并非取决于绝对定位精度,而是看定位位置是否与实际场景相符,这是应用高精地图的关键。因此,不需要高精定位和高精地图精度,只需要局部一致;高精地图仍然是智能驾驶必须依赖的道路元素和拓扑信息,可以提供道路元素和初步信息,然而,在局部观察时,我们更相信局部定位和局部感知,就像驾驶汽车时,既要心中有图,更要关注眼前的路;探讨如何与图商进行更深入的合作,对于车厂来说,我们是车端数据的应用者,同时也是智能AI技术的开发者和高精地图的使用者,相信在未来,我们将成为高清地图元素的定义者,因此,探讨如何与图商更深入的合作,从买图用图,到车端可以建图,甚至可以参与到地图制作当中去,而非仅仅将地图作为产品交给车企,这样的合作将实现城区更安全、可靠的NOA落地。
零跑已上市的车型有S01、T03、C11、401,以及今年发布的C11,致力于解决大家的里程焦虑,预计未来会有更多新车型发布,同时还将搭载智能驾驶辅助的硬件和软件。
(以上内容来自零跑汽车地图定位算法负责人黄栋泽于2023年6月14日在2023第五届自动驾驶地图与定位大会发表的《低成本地图定位助力智能驾驶量产落地》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202306/20I70346201C106.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921