
智能辅助驾驶行业的发展已迎来九局下半。现阶段,攻克城市场景成为自动驾驶演进的必经之路。
2022年,城市NOA被频繁提及。更有多方观点认为,2023年将是城市NOA的落地元年。
随着新能源市场愈发内卷,在辅助驾驶方面已难以拉开较大技术差距,而越快落地城市NOA,掌握实现全场景辅助驾驶的技术实力,似乎就越能在未来的市场竞争中占据主动权;此外,资本市场的推动更是让城市NOA的落地节奏不断加快......多家相关企业已做足充分准备,准备抢占市场先机。
然而,与高速NOA相比,城市NOA面临的交通道路复杂程度呈倍数级增长,对于软硬件能力也提出了更高要求。那么具体来看,城市NOA的落地将通过哪些技术路线实现?包括NOA在内的智能辅助驾驶市场规模如何?其中有哪些玩家,国内外的市场竞争格局如何?L2与L4为何殊途同归?智能辅助驾驶未来将走向何处?
为解答上述问题,在近期由盖世汽车研究院举办的“迈向新周期:2023年中国汽车市场格局重塑闭门分享会”主题沙龙活动中,由盖世汽车研究院副总监张志文分享的《智能辅助驾驶趋势展望》报告,从智能辅助驾驶发展现状、市场分析、趋势展望等维度对智能辅助驾驶的现状与未来进行分析和研判。
背景:智能辅助驾驶发展现状及驱动因素
技术概览
从功能体系来看,智能辅助驾驶系统包含行车和泊车两大功能。
当前,行车功能正从过去横纵向自动控制的基础驾驶辅助升级到更为高阶的高速/城市领航,其中主要有以特斯拉为代表的纯视觉技术感知+实时局部建图,以及大部分企业所采用的多传感器融合+高精地图两种技术路线。
而泊车功能正逐渐从APA自动泊车升级到AVP代客泊车。代客泊车方案主要包括车端智能、场端智能和车路协同三种技术路线,而从技术实现的角度来看,单车智能方案对停车场依赖性低,同时向其他自动驾驶场景的迁移性较强,落地难度系数小,因此现阶段更受主机厂青睐。全场景点对点领航是智能辅助驾驶的发展趋势,从发展历程来看,行车智能辅助的发展主要会经历单车道-多车道-点对点领航辅助三大阶段。
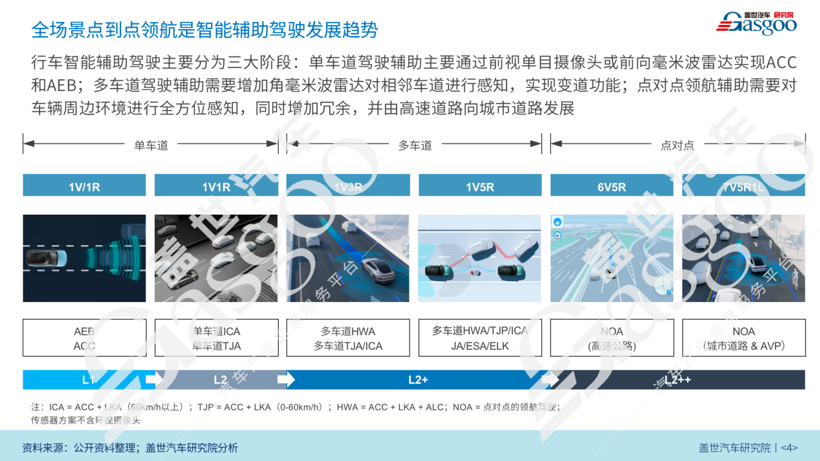
单车道驾驶辅助主要通过前视单目摄像头或前向毫米波实现ACC和AEB功能。当发展到L2阶段,便能够实现单车道ICA和单车道TJA等功能。第一代通用Cruise属于这一技术路线的代表。
多车道驾驶辅助则需要在车辆四周增加角毫米波雷达对相邻车道进行感知,实现变道功能。
相较于基础的驾驶辅助功能,点对点领航辅助对于车辆四周的监测感知要求更高,需要对车辆周边环境进行全方位感知,同时增加传感器冗余。目前,点对点领航辅助正在由高速道路探向城市道路。
国内领航辅助的发展始于2019年,特斯拉向中国用户推送了NOA功能,随后蔚小理等新势力也纷纷入局,推出高速领航功能。从2022年上半年开始,吉利、荣威等自主品牌也开始在旗下的部分传统燃油车上推出高速领航功能。
面向城市复杂道路的领航辅助,搭载城市NCA智驾导航辅助功能的极狐阿尔法S HI版于2022年9月在深圳正式落地,这也是国内城市领航功能的首次落地。
除此之外,多家车企已做好解锁城市NOA功能的准备。今年3月,阿维塔将实现城市领航辅助驾驶功能的推送;无独有偶,百度Apollo ANP 3.0也将推出城市领航方案。
整体来看,现阶段高速领航辅助驾驶已逐渐普及,城市领航辅助驾驶也正加速落地。无论是业内观点还是市场现状都无不透露出一种迹象:立足于“城市NOA元年”,2023年或将迎来城市领航辅助驾驶功能的密集落地。
三轮驱动,领航辅助驾驶落地加速
盖世汽车研究院认为,领航辅助的场景开放度逐步提升,落地节奏不断加快的背后,由用户、政策以及供应链三层要素驱动。
从用户端来看,消费者对自动驾驶功能有较高需求。《麦肯锡中国汽车消费者洞察》报告显示,目前消费者对于高速道路等特定场景下的自动驾驶功能有着较高需求。
当然,面向交通路况更为复杂、具有一定潜在风险的城区,消费者目前对于城市领航的需求相较于泊车和高速场景更低。
当前大多数消费者对于领航功能还处于观望状态。在城市NOA放量之前,还需继续建立用户层面的认知,增加潜在用户的购买信心,以促进市场规模的提升。
在政策端,紧锣密鼓出台的政策在推动城市领航辅助驾驶落地的同时,也影响着相关企业对技术路线的选择。
高速领航辅助主要依赖车辆的感知硬件以及高精地图和高精定位。目前,针对国内约30万公里的高架、高速道路,高精地图已基本实现了完全覆盖。
然而对于城市领航辅助,除了感知硬件的升级之外,城市领航功能的落地还在一定程度上依赖于所在城市高精地图的开放。
2022年8月,自然资源部办公厅印发的《关于做好智能网联汽车高精度地图应用试点有关工作的通知》支持在北京、上海、广州、深圳、杭州、重庆等6个城市首批开展智能网联汽车高精度地图应用试点。此后,广州、深圳和上海陆续发放了城市高级辅助驾驶地图许可,百度地图与腾讯地图也取得了相应的测绘资质。
整体来看,国内城市高精地图的推广遵循着“地方试点-经验复制-大规模推广”的模式。随着广州、深圳、上海3个城市先后发放高精地图城市试点的许可,未来有望进一步向其他城市推广。
当然,城市高精地图的推广并非畅通无阻。近年来,高精地图的测绘、制图资质逐渐收紧,2021年下半年起,自然资源部开展了测绘资质复审换证工作,截至目前复审通过的企业数量仅为19家,相较于此前具备甲级测绘资质的企业数量减少了12家。
资质收紧,叠加成本高、鲜度低等原因,领航辅助驾驶赛道内的许多企业开始将目光投向“重感知,轻地图”路线。
在供应链层面,国内逐渐完善的供应链也促使着国内领航辅助驾驶的落地节奏加快。目前,国内领航辅助驾驶供应链已涵盖芯片、域控制器、软件算法、地图等领域,部分供应商和主机厂也已具备提供系统解决方案的能力。
何时真正落地?

具体而言,国内车企的城市NOA落地情况如何?
目前,极狐阿尔法S、小鹏P5已分别在部分城市实现了城市领航功能的全量推送,长城旗下的魏牌摩卡DHT-PHEV激光雷达版与毫末智行合作推出的城市NOH系统也正处于测试阶段,不过至今这款车型尚未交付。
其中,在2022年9月中旬,采用华为方案的极狐阿尔法S HI版率先实现了城市领航的落地,并在深圳、上海两地进行了推送。盖世汽车研究院认为,华为对于智能驾驶芯片、感知算法、高性能传感器等全栈能力的布局,以及高精地图资质是其城市领航功能率先落地的重要原因。
在高速领航辅助方面,针对在高速场景中通过ETC和换电的场景,百度Apollo ANP 3.0和蔚来NOP+推出的领航辅助功能创新——自动通过ETC和自动领航换电,保证了高速场景点对点安全、高效通行。
例如蔚来的第三代换电站搭载了2颗英伟达Orin-X芯片+2颗激光雷达,使蔚来车辆能够在高速领航辅助驾驶状态下,自动驶入高速服务区、进入换电站,并且自动进行换电和驶离,实现了高速场景内的点对点高效换电和通行。
百度Apollo则是以自主泊车为起点,逐步实现了全场景的自动驾驶。作为首批实现泊车、高速和城市场景三域融通的领航辅助驾驶方案,ANP 3.0预计将于今年6月搭载于集度车型进行量产,进一步完善用户的点对点体验。
市场分析:开启前装量产时代,众多玩家谁主沉浮?
市场分析之一:L2放量,NOA搭载量未来将达数百万
随着智能辅助驾驶功能的不断成熟,加之价格降低,消费者接受度提升,L2已经成为当前的主要驾驶辅助方案,车型主要集中于10-12万的价格区间。未来该价格区间车型销量的提升也将促进L2的装配量进一步提升。
此外,L2也成为了一项市场竞争的重要指标。从L2渗透率来看,目前Top20品牌已分化为三个梯队:
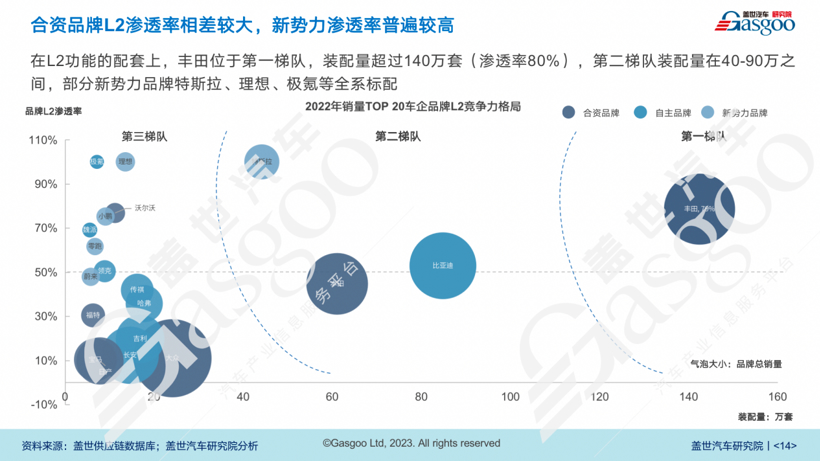
从装配量来看,丰田位于第一梯队,其L2装配量超过140万套,渗透率接近80%;特斯拉、比亚迪、本田位于第二梯队;而大众的乘用车虽然销量较高,但L2渗透率仅仅处于10%水平线上下,与宝马、日产、福特等一同属于第三梯队。
可见,在L2的装配量上合资品牌的两极分化较为明显。
再来看渗透率,相对而言,新势力品牌的渗透率L2普遍较高,特斯拉、理想、极氪等基本已实现全系标配。
在功能层面,基础辅助驾驶的渗透率持续提升,并往更高阶的领航辅助功能发展。
从具体功能来看,2022年AEB功能的渗透率已接近50%。作为一项基础实用的安全性功能,AEB目前已在商用车上实现标配。在乘用车方面,盖世汽车研究院认为AEB或将在中高端车型上率先实现标配。
从核心智能辅助驾驶功能在不同价格区间的渗透率表现来看,中低端车型的智能辅助驾驶功能渗透率持续提升。全速ACC、LKA、TJA/HWA等功能已下探到10-20万价格区间,APA功能目前主要集中在30-40万价格区间,同时也存在配置下探的趋势。
在2022年上市的L2级新车中,具备L2功能的新车传感器方案以5-6V+5R方案为主。而具备领航功能的新车则增加了激光雷达传感器,作为增强车辆感知能力的方案。
对于更高阶的智能辅助驾驶功能,由于目前高等级自动驾驶相关的法律制度还有待完善,且技术难度较高,L2+ ADAS目前仍多搭载于高端车型,搭载总量较少。以L2+ ADAS的典型功能领航辅助为例,目前标配NOA领航功能的车型接近90%集中在30万以上的价格区间。
当然,NOA也有向中低端车型下沉的趋势,当前高速领航辅助功能已逐渐下探到小鹏P5、吉利博越L、荣威RX5 NGP智驾版等20万以下的车型。盖世汽车研究院根据相关车型在乘用车中的销量占比预测,随着搭载领航功能的车型逐渐下探到15万左右的价格区间,2025年搭载量预计将突破400万辆。
市场分析之二:本土供应商崛起,多方玩家撬动NOA市场
在供应链格局上,博世、电装、采埃孚、大陆、法雷奥等外资Tier1在ADAS和泊车领域仍占据主要市场份额。
近两年,本土供应商开始从自主品牌打入市场。随着自主品牌销量的上量,本土供应商占据的份额不断也提升,在泊车领域更是呈现出从15%至27%的明显提升。随着自主品牌的崛起,未来本土供应商的市场份额有望进一步增加。
目前,领航辅助市场的竞争格局分为OEM全栈自研、OEM与供应商深度合作、ADAS供应商向上拓展和L4供应商技术降维四类。

车企方面,除了特斯拉、小鹏、蔚来、理想、长城旗下的毫末以及上汽飞凡等部分主机厂采用全栈自研方案,其余的大部分主机厂都选择采用第三方供应商方案,或者与供应商深度合作进行开发。
例如,长安阿维塔、北汽极狐以及广汽选择通过HI模式与华为ADS智能驾驶辅助系统深度绑定。
而上汽智己携手Momenta打造的IM AD智能驾驶系统IM AD NOA搭载于智己L7,IM AD NOA高速高架领航辅助功能的正式版本预计将于2023年第一季度上线,后期通过加装激光雷达也将能实现城市导航辅助驾驶功能。
今年1月,极氪与Mobileye携手推出的NZP高速自主领航辅助系统也开启了全面测试。
在供应链端,主要存在升维和降维两种技术路线。
禾多科技、宏景智驾、智驾科技MAXIEYE、易航智能、福瑞泰克等ADAS供应商选择向上拓展的路线,目前正向着NOA等高阶辅助驾驶功能冲刺发力。例如,福瑞泰克正在开发的核心域控制器产品ADC28计划在今年第三季度SOP,在功能上将支持城市NOA;去年,智驾科技MAXIEYE也宣布其新一代L2++级智能驾驶系统产品MAXIPILOT成功部署领航辅助驾驶功能。
从L4转战L2+市场的玩家方面,百度Apollo ANP 3.0和轻舟智航的“乘风”都瞄准了城区场景,并宣布相关城市NOA解决方案将于今年量产,小马智行也宣布将在年内上市城区NOA整体方案。
在多方玩家的撬动下,NOA将进入全新的落地阶段。
市场分析之三:角逐领航辅助,渐进式路线更优
自动驾驶产业的发展现状相对复杂,但在技术路线的选择上无外乎可归纳为“渐进式”和“跃进式”两大类。
2022年,Robotaxi融资遭遇寒冬。受限于技术、政策等因素,L4的商业化进程仍较为缓慢。面对资本谨慎、输血不足的现状,L4 降维进入L2前装量产成为趋势。
由于领航辅助驾驶与L4自动驾驶的场景复用度较高,L4供应商将技术降维到L2级领航辅助,能通过L2乘用车收集到的数据流反哺到L4,从而不断迭代算法。
两种技术路线相比之下,跃进式发展主要面临商业化落地难、数据覆盖少等问题,只能从特定场景落地,不断迭代;而渐进式发展则利用乘用车的规模优势进行低成本数据收集,形成正向循环,最终实现技术演进。
正因如此,渐进式路线开始被广泛认可。轻舟智航联合创始人、CTO侯聪曾向媒体表示:“我们坚信L4肯定会实现,但是作为创业公司可以渐进性地先做城市NOA,在这个基础上不断获得数据的闭环与现金流的闭环,这样才能持续迭代技术,最终实现L4的产品。”
盖世汽车研究院认为,渐进式发展路线平衡了商业化落地和技术储备,相对更有优势。
市场分析之四:软硬配置迭代赋能NOA进阶
从高速领航辅助驾驶向城市领航进阶,对于硬件配置和软件算法也提出了更高要求。
对于高速领航辅助驾驶,主机厂的基础硬件主要采用1V5R方案,通过前视摄像头进行车道线识别和物体识别,毫米波雷达(前向+角向)实现障碍物探测和纵横向运动,同时由于高精地图+定位的加持,对于AI算力的要求较低。
而城市场景下的领航辅助,由于道路环境更加复杂,需要更多传感器进行环境感知。传感器数量和摄像头像素的提升都对AI算力提出了更高要求,具备相关功能的车型往往需要数百甚至上千TOPS的算力,因而在芯片的选型上也会有一定冗余备份考虑。

在人机交互界面方面,SR界面的显示细节也更加丰富。过去的SR界面信息显示较为单一,仅能显示单向车道线和少量交通参与者。随着建模的精细度提升,当前的SR界面已发展至外部环境渲染逼真的状态。以小鹏NGP的界面为例,其显示内容包括写字楼、高架、红绿灯状态、旁车转向灯信号、车辆可行驶区域引导面、转向点提示等。
在当前的人机共驾阶段,驾驶员对于系统决策的信任感还有待提升。盖世汽车研究院指出,完整的SR模拟显示系统能够直观地让用户了解车辆的感知边界,在复杂的城市工况下能在一定程度上降低驾驶员的紧张程度,结合语音提醒、播报来增加人机共驾的信任感。
在软件算法层面,目前大部分车企都选择跟进特斯拉的方式来迭代感知算法。
过去的传统单任务模型往往由一个单独的模型负责一个任务,负责不同传感器的多个模型之间各自为营,其本质上仍依赖于人工的监督学习。
随着大模型时代的到来,越来越多车企选择从单任务处理模型迭代至大模型,在一个主干网络下共享多个任务,避免大量重复计算。
随着更高阶的智能辅助驾驶功能出现,相关算法也迭代至BEV算法、 Occupancy Networks占用网络算法。
BEV算法将多帧摄像头融合后形成鸟瞰视角,能让感知、预测等模块在鸟瞰空间完成。然而,BEV检测需要依赖人工标注训练分割的任务检测,且对于一些不规则的障碍物难以识别。
对此,特斯拉提出Occupancy Networks占用网络算法,通过堆叠方格表示物体占用体积的方式将BEV算法从2D平面升级到了3D空间,能够有效减少对不规则障碍物的漏检、误检风险。
无论BEV还是Occupancy Networks占用网络,其目的都是弥补特斯拉因没有安装激光雷达而无法准确还原车辆周围3D场景的不足。在激光雷达降本艰难的当下,Occupancy Networks不失为多传感器融合路线下的一种新思路。
趋势展望:智能辅助驾驶将走向何处?
趋势展望之一:行泊一体成为当前智能驾驶领域的主流方案
盖世汽车研究院认为,点对点的领航辅助驾驶依赖于行泊一体技术的发展。
当前,整车的电子电气架构正经历从传统分布式向域集中式升级,并持续向中央集中式架构演进的变革。
在域融合的趋势中,形成了行泊一体、舱泊一体两种融合路径。盖世汽车研究院认为,行泊一体将成为当前智能驾驶领域的主流方案。
目前,舱泊一体仍存在一定局限性:
在组织内部,座舱和泊车通常由两个相互独立的团队分别负责,并交由不同的供应商进行开发,跨部门、跨组织的沟通成本高;
此外,座舱和泊车对于芯片功能安全的要求也不同。相较于泊车,座舱芯片的功能安全等级要求更低。目前座舱域控芯片的功能安全等级只能支持一些相对初级的泊车功能(如360环视、自动泊车辅助APA等),而未来更高阶的泊车功能必然会涉及到更高的功能安全要求,届时舱泊一体架构将面临一定瓶颈。
相对而言,行泊一体能够很好地解决这些问题。
通过行车功能与泊车功能的融合,行泊一体技术能实现传感器的深度复用和计算资源的共享,帮助主机厂降本增效,提升开发效率,从而推进点到点领航辅助驾驶的实现。
趋势展望之二:「重感知,轻地图」或将重新定义城市领航辅助
当前高精地图的发展拖慢了城市领航辅助的落地速度,企业纷纷转向轻地图方案,降低对高精地图的依赖,以此加快城市NOA的落地。
在2022年的极狐阿尔法S HI版上市发布会上,华为副总裁、智能汽车解决方案BU CEO余承东表示,将逐步减少对高精地图的依赖。
同样改变技术策略的还有小鹏。今年1月,小鹏汽车董事长兼首席执行官何小鹏在小鹏汽车全员会上明确提出,2023年的X-NGP辅助驾驶将抛掉高精地图。
正如前文所述,路线转变的背后,地图资质收紧、城市领航辅助驾驶落地节奏加快以及高精地图成本高、鲜度低是其主要原因。
目前,地图采集车的成本较为高昂。采集约30万公里的全国高速公路,并达到季度更新尚可,但若是城市领航走向应用落地,所需地图信息的采集和更新需覆盖约1000万公里并达到天级更新,这和高速领航的成本和工作量已不在同一个等级。
当然,轻地图并非代表不需要地图。随着单车系统感知能力的增强,高精地图中的某些元素可以通过感知系统进行获取,但诸如车道拓扑关系等无法被感知的部分仍需要高精地图来表达。
事实上,“轻地图”更多意味着需要提升整个系统的能力,降低对地图的依赖性。盖世汽车研究院认为,高精地图作为传感器的冗余,可以为感知和定位起到反向验证的重要作用。
趋势展望之三:打造数据闭环,引入Transformer
从硬件驱动到软件驱动时代,基于CNN卷积神经网络的深度学习被引入自动驾驶领域,并在大规模应用中驱动着软件算法走向成熟。

今天,硬件驱动和软件驱动时代已接近尾声,自动驾驶的发展进入数据驱动的全新阶段。在3.0数据驱动时代,自动驾驶需要对海量数据进行高效率、低成本的处理,并将其转化为有价值的数据。如何收集数据并应对Corner Case长尾场景的难题,成为这一阶段的发展重点。
要化解长尾场景的难题,就需要进行大量的数据收集、标注、训练和部署。此时,过去依靠CNN卷积神经网络训练自动驾驶的方式难免显得有些低效。
在此背景下,“大模型+大数据”的数据驱动模式成为自动驾驶技术进化的关键。使用大数据训练神经网络、提升自动驾驶迭代速度,已经成为行业内的共识。
自2018年之后,在特斯拉的带动下,能够提高训练效率的Transformer训练模型开始流行。特斯拉量产车配备的“影子模式”能在行车过程中收集大量驾驶数据,并生成数据集用于训练算法模型,从而形成数据闭环,增强自动驾驶能力。随后,小鹏、 毫末也相继推出自动驾驶数据闭环体系。
具体而言,此类数据闭环首先通过量产车收集用户真实驾驶数据,并对其中的高价值数据进行标注,通过Transformer进行算法模型的预训练。最后结合真实数据和仿真数据,逐渐实现对各类Corner Case场景的拟合。
趋势展望之四:超算中心将成为自动驾驶入门配置
随着自动驾驶车辆的增加,需要处理的数据呈倍数级增长,对算力的需求、功耗要求都大幅提升,算力正成为汽车行业的一项关键竞争因素。目前来看,超算中心将是解决这一挑战的有效路径。毫末智行董事长张凯直言:“超算中心会成为自动驾驶企业的入门配置。”
如今已有越来越多车企意识到,高阶自动驾驶要想实现数据的快速迭代,除了需要里程的积累,更要掌握高效、低成本进行数据处理的能力。因此,在自动驾驶领域具有长期规划造车新势力、传统品牌和技术供应商都已开始搭建自己的超算中心,以便掌握稳定的算力资源,缩短开发周期,加快自动驾驶产品的上市。
特斯拉在2021年就发布了自研云端智算中心Dojo,主要用于自动驾驶AI数据的训练和标注,具有1.8EFLOPS的算力。
2022年8月,小鹏汽车与阿里云发布了小鹏汽车智算中心,名为“扶摇”,其算力可达600PFLOPS(每秒浮点运算60亿亿次),将小鹏汽车自动驾驶核心模型的训练速度提升了近170倍。
除此之外,蔚来、毫末、华为、阿里云、大陆也纷纷公布了对于智算中心的布局。
当然,作为云计算基础设施,建设超算中心需要巨大的前期投入。据盖世汽车研究院统计,28%的主机厂和传统Tier1搭建人工智能计算中心的投资金额高达1-1.5亿元。
不过,盖世汽车研究院指出,虽然超算中心的前期搭建成本较高,但随着自动驾驶规模的扩大,边际成本将会有所收敛。相对而言,其他途径在初始投资时门槛稍低,但到了后期边际成本会逐渐发展到不可控的状态。
趋势展望之五:L2与L4由对立逐步走向融合互补
过去乘用车L2功能更多针对高速场景进行设计(如ACC、LKA、ALC等),而L4 Robotaxi则主要针对城市场景,两者在感知硬件和软件算法上存在很大差异。
随着乘用车向城市领航功能过渡,两者逐步由对立走向融合。

当前已有部分企业选择采用一步到位的硬件预埋方案,L2、L4并行发展。日前,小鹏汽车官方宣布,小鹏G9成功获得广州自动驾驶道路测试牌照,具备中国道路范围内的自动驾驶道路测试资格。获得上述牌照的小鹏G9完全采用了在售量产车作为载体,仅在软件层面进行了升级,这意味着小鹏G9在自动驾驶硬件上已达到L4的水平。
在软件算法层面,不同于过去用单一软件服务于单项功能的开发方式,目前许多企业倾向基于同一套L4架构,进行全场景的软件开发。
殊途同归,最后或将形成这样的数据闭环:底层的L4架构融合L2乘用车的感知方案,加之大算力平台的驱动,L2乘用车大规模收集的数据将反哺于Robotaxi,使之进行算法迭代,而不断迭代的L4技术也将助力L2城市领航辅助驾驶的落地,最终形成技术共生的良性循环。
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/news/202302/22I70331245C111.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921



















