汽车电动化、智能化的发展,必然引发底盘系统从传统底盘向电动底盘、智能底盘的技术变革。
在2022年11月18日的盖世汽车2022第二届汽车智能底盘大会上,华夏龙晖(北京)汽车电子科技股份有限公司研发院院长罗会标表示:传统ECU平台构架、分散式开发已满足不了智能车多部件生命周期内的按需协同,因此需要统一整车软件架构和能力,通用域控制器平台也应运而生。
华夏龙晖的多域控制器平台采用的是AUTOSAR分布式分层架构,模块间实现松耦合与服务化,软件易重用,此外,I/O与计算解耦也有助于业务的灵活部署、独立升级。

罗会标 | 华夏龙晖(北京)汽车电子科技股份有限公司 研发院院长
智能驾驶“风起”,底盘域控变局将至
智能化浪潮下,智能座舱和智能驾驶市场已然成为万众瞩目的两大蓝海,而作为智能驾驶的主要载体,汽车底盘从机械向集成化、轻量化和智能化发展,无疑是大势所趋。
在此背景下,汽车底盘正逐步从传统底盘、电动底盘向智能底盘变革。其中,传统底盘具有承载和行驶这两大基础功能,以发动机和变速箱为承载主体,机械耦合程度深,结构复杂,通用性差,往往一个车型对应一种底盘类型,且一般都只能被动响应。
电动底盘在一定程度上进行了机械解耦,实现了电机驱动,在布置和控制上更加灵活,多个车型可以对应一种底盘,还可以实现纵向、横向的独立控制。
在延续传统底盘的两大基本功能的基础上,智能底盘实现了进一步扩展:承载对象由以动力系统为主,扩展为承载座舱、自动驾驶、动力三大系统,具备认知、预判、控制车轮与地面相互作用、管理自身运动状态的各项功能。
更重要的是,智能底盘将全方位实现机械解耦,实现纵,横,垂三向一体化主动控制,并具备自学习的能力,从而为用户提供更舒适、更个性化的驾驶体验。

从传统底盘向智能底盘的演进 图源:华夏龙晖
要达成以上目标,必须实现线控制动系统,线控转向系统,智能悬架系统的深度协同,这也正是智能底盘的本质要求。

智能底盘的基本架构 图源:华夏龙晖
路向何方?商乘双维度下的智能底盘发展路径
具体而言,智能底盘将沿怎样的路径发展?这需要基于乘用车和商用车的不同维度进行考虑。
首先,乘用车智能底盘的发展会经历以下三个阶段:
1.0阶段,要求智能底盘具备域控制系统且系统接口标准化,能够实现纵向和横向的部分线控化和协同控制,具备OTA功能;
2.0阶段,智能底盘就需要在横向、纵向、垂向上实现三方向线控化和协同控制,实现底盘一体化域控,达成“软件定义底盘”。
3.0阶段,已经可以实现四轮驱动汽车底盘的高度集成与控制(4WD+ESC+EPS+空气悬架),此时的智能底盘将具备自适应、自学习能力,并全面实现功能安全和预期功能安全的集成控制,并搭建健全的信息安全防护体系。
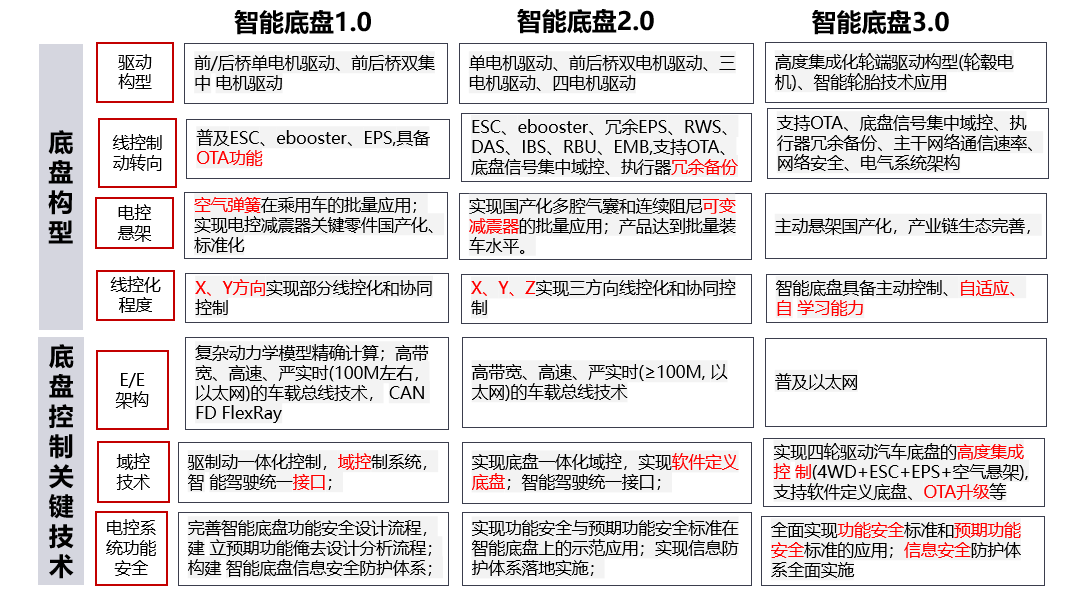
智能底盘的发展路径 图源: 中国汽车工程学会
由于在高阶自驾领域的发展较快,商用车智能底盘发展路径可以直接根据自动驾驶等级进行划分:
对L2及以下的低等级自动驾驶而言,底盘采用分布式控制系统结构,具备主动纵向控制即可。
对L3级别而言,需要底盘子系统作为冗余备份,具备主动纵向和主动横向控制、系统健康报警功能。
对L4级别而言,需要以底盘域控最小功能作为冗余备份,具备底盘线控子系统、主动纵向控制、主动横向控制、横纵协同控制、系统健康报警功能。
而L4级以上还会增加底盘域全功能备份,需要纵横垂三向的协同综合控制。
“解耦&多域协同” 智能底盘系统的发展关键词
智能底盘的性能提升与控制系统息息相关,罗会标看来,智能底盘控制系统有五项基本要求:
第一、解耦。智能底盘将高度解耦,包括机械解耦、软硬件解耦和应用系统解耦。
其中,机械解耦是电控的基础,软硬件解耦可以实现软硬件的异步开发,提高软件复用性,应用系统解耦有利于不同供应商之间实现分工协作,快速实现系统的开发。
第二、域控。智能底盘系统要求实现纵横垂三向的协同控制,罗会标强调:“这一点的实现必须在底盘域层面基础之上。”
第三、高智能化。不但具备主动控制功能,还需具有自适应、自学习的能力,从而根据不同客户的驾驶习惯提供个性化的服务。
第四、安全。包括多重安全控制和跨域安全控制,其中,多重安全控制可以在底盘域范畴内实现,涉及到预期功能安全和信息安全;跨域安全控制主要指底盘域同动力域、自动驾驶域的协同控制安全。
第五、扩展性。系统需要平台化、模块化、接口标准化、以及配备OTA功能。

智能底盘控制系统的五大要求 图源:华夏龙晖
为了实现以上要求,智能底盘控制系统在开发上将面临三项技术重点:
首先是架构问题,系统开发过程中,架构的选择至关重要。
智能底盘需要采用分布式系统架构,将系统控制的核心功能集中在域控制器,并对各子系统进行协同控制,以达成响应速度快,高控制精确度的要求。
软件方面,基于AUTOSAR的分层软件架构将是主流,实现软硬件解耦,支持异构开发,支持OTA升级,从而实现系统快速迭代升级。
第二个重点是域控,除了底盘系统纵横垂三维一体化协同控制,智能底盘需要与自动驾驶域、动力域、车身域等一起多域融合控制,达到更好的控制性能和安全性。罗会标强调,一体化协同控制算法、多域融合算法、大数据分析与应用将是重点研究课题。
第三个重点是功能安全,智能底盘需要具备产品功能安全、预期功能安全、信息安全等多重安全保护。
实际上,华夏龙晖所推出的多域控制器平台解决方案正瞄准了以上三方面的技术重点。
抢先发力多域控制器,华夏龙晖优势为何?
2006年,华夏龙晖汽车电子科技股份有限公司成立于北京,聚焦智能车控领域的核心控制技术研发与产业化,是北京市“专精特新”企业,中国汽车基础软件生态委员会(AUTOSEMO)会员单位,国家及北京市软件企业和软件产品“双软”认证企业。
罗会标提出,“传统ECU平台构架、分散式开发已满足不了智能车多部件生命周期内的按需协同,因此需要统一整车软件架构和能力,通用域控制器平台也应运而生。”
具体而言,传统的ECU平台一般采用分散、烟囱式的软件架构,一个模块的改变往往会牵一发而动全身,带动多个模块的变更,这样难以实现单个模块的独立升级,且软件的复用性较差。
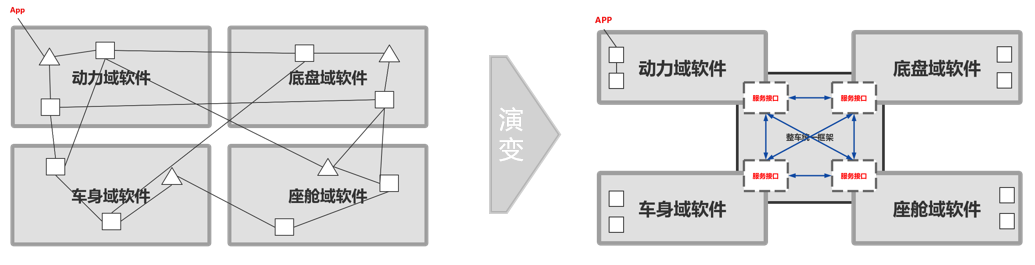
从分散式向通用域控制器的演进 图源:华夏龙晖
考虑到这一点,华夏龙晖的多域控制器平台采用的是AUTOSAR分布式分层架构,模块间实现松耦合与服务化,软件易重用,此外,I/O与计算解耦也有助于业务的灵活部署、独立升级。
硬件架构上,罗会标表示,“华夏龙晖的多域控制器采用的是模块化,积木化的开发方式,可以根据不同的应用场景匹配不同的元器件。”
其核心MCU选取的是ST等国际主流芯片(也同国内芯片厂商合作推出全国产化方案),电源部分则支持12 V和24 V两种系统,传感器电源输出部分可以满足不同类型传感器(5V,8V,9V)的电源需求;IO方面,系统资源丰富,可以灵活定义端口;通讯方面,支持LIN,CAN,以太网这三种通讯模式。

多域控制器平台硬件架构 图源:华夏龙晖
此外,华夏龙晖具有从架构设计、建模、编译、调试、标定完整的开发工具链,可以保证开发质量和开发进度,系统安全可靠、资源消耗小、可裁剪、可扩展、移植性强。
总而言之,华夏龙晖的多域控制器平台具有五大优势:高性能MCU,安全设计,标准通讯接口,快速迭代升级,软件架构平台化,可支持底盘控制、动力系统、整车控制、车身控制四类应用场景:

华夏龙晖的多域控制器平台的功能实现 图源:华夏龙晖
以“为智慧出行提供动力和安全保障”为企业愿景,华夏龙晖在汽车核心控制领域已历经十六载春秋。从汽油发动机动力总成研发并量产百万,到2017年抢先发力底盘域控赛道,正如罗会标所言:”公司将聚焦智能车核心控制领域,力求突破国际垄断,为汽车核心控制模块提供国产化方案。”
目前,华夏龙晖正基于底盘域控(CDCU)、动力域控制器(PCU)、电驱动域控制器的研发和量产经验,向多域控制及中央域控这一全新领域展开探索。
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/news/202212/5I70323526C103.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921