盖世汽车讯 据外媒报道,来自剑桥大学、牛津大学和伦敦大学学院(UCL)的研究人员开发了首款基于激光雷达的车用增强现实抬头显示器。原型测试表明,该项技术可以“看穿”物体,在不分散驾驶员注意力的情况下,提醒潜在危险,从而提高道路安全。
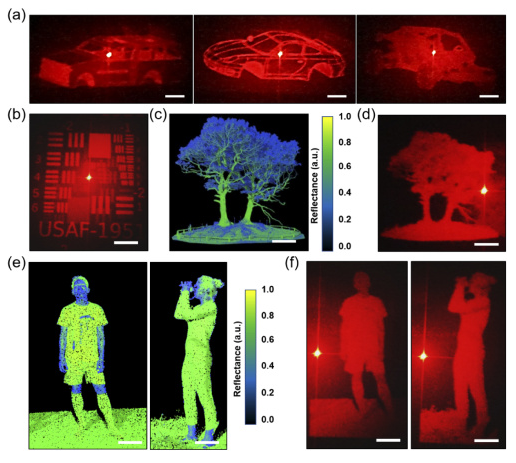
(图片来源:www.osapublishing.org)
与大多数抬头显示器所使用的2D挡风玻璃投影不同,该项技术基于激光雷达,并使用激光雷达数据,创建表示道路物体的超高清全息图像,并将其直接传输至驾驶员的视野。虽然该项技术尚未在汽车中进行测试,但基于从伦敦市中心繁忙街道收集的数据的早期测试显示,全息图像会根据驾驶员的实际位置出现在其视野中,从而生成增强现实。当路标等物体被大树或卡车遮挡时,此种方法尤为有用,例如,可让驾驶员能“看穿”视觉障碍物。
该研究的主要作者、剑桥大学工程系博士研究生Jana Skirnewskaja表示,“目前,抬头显示器正在被整合到联网汽车中,通常会将速度或燃油量等信息直接投射到驾驶员前方的挡风玻璃上,但是驾驶员必须一直盯着路面。然而,我们想更进一步,将真实物体呈现为全景3D投影。”
Skirnewskaja及其同事以激光雷达为基础,创建了该系统。研究人员利用激光雷达扫描Malet街,这是位于伦敦市中心伦敦大学学院校园里一条繁忙的街道。合著者Phil Wilkes是一位地理学家,通常使用激光雷达扫描热带森林,现在使用称作陆地激光扫描的技术扫描整条街道。数以百万计的脉冲从Malet街的多个位置发出。随后,激光雷达数据与点云数据相结合,创建3D模型。
Phil Wilkes表示,“通过此种方式,我们可将扫描结果结合在一起,构建完整的场景,不仅可以捕捉树木,还可以捕捉汽车、卡车、人、标志,以及典型的城市街道上的一切物体。虽然我们采集的数据来自固定的平台,但其类似于下一代自动或半自动驾驶汽车的传感器。”
Malet街的3D模型完成后,研究人员将街道上的各种物体转化为全息投影。激光雷达数据以点云的形式呈现,通过分离算法进行处理,对目标物体进行识别提取。另一种算法用于将目标物体转换为计算机生成的衍射图案。这些数据点被部署到光学装置,从而将3D全息物体投射到驾驶员的视野。
该光学装置能够在高级算法的帮助下投射多层全息图。全息投影能以不同尺寸呈现,并与其所代表的真实物体的位置保持一致。例如,隐藏的路标位于障碍物后方,全息投影会显示其实际位置,作为一种警报机制。
未来,研究人员希望使抬头显示器的布局个性化,进一步完善该系统,并开发算法,能够投射不同物体的多个层面。这些分层全息图可以自由安排,出现在驾驶员的视野中。例如,在第一层,距离较远的交通标志可以投射成较小的尺寸。在第二层,距离较近的警示牌能以较大的尺寸显示。Skirnewskaja表示,“这种分层技术提供增强的现实体验,并能自然地提醒驾驶员。每个人可能对显示选项有不同的偏好,例如,可选择将驾驶员的生命健康体征投射到抬头显示器的理想位置。”
“全景全息投影可实时显示道路物体,可有效地补充现有的安全措施。全息图像可以提醒驾驶员,但不会分散其注意力。”目前,研究人员正致力于减小全息装置所采用的光学装置的尺寸,使其能够安装到车辆中。安装完成后,研究人员将在剑桥的公共道路上进行车辆测试。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202104/26I70252113LC601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921