
盖世汽车讯 在自动驾驶中,基于立体视觉的深度估计技术可以准确地估计出障碍物与车辆的距离,该技术对于车辆正确规划路径也至关重要。
(图片来源:SIAT)
立体深度估计已经变成配备卷积神经网络的深度学习模型,不过,此类模型后续需要进行大量的处理,对不适定的区域或新场景没有很强的适应能力。此外,由于在真实情况下,很难标记真实的地面深度,该系统的训练数据也很有限。
据外媒报道,中国科学院深圳先进技术研究所(SIAT)的Zhang Qieshi博士领导了一个研究小组,提出一种新型技术解决方案,以解决目前自动驾驶中存在的深度估计问题。
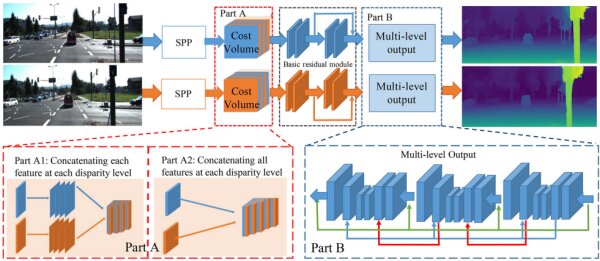
研究人员提出了一种自我改进金字塔立体网络,后续无需复杂处理就可直接复原差距,而且在不适定的区域,该网络也展现了较强的鲁棒性。
此外,通过在线学习,该模型不仅解决了数据局限性问题,还在实际应用中节省了培训时间和硬件资源。同时,面对新场景,具备自我改进的能力,能够根据测试数据及时快速调整,以提高预测的准确性。
研究人员进行了实验以及基准测试,结果表明,新提出的网络能够实现深度估计功能,而且错误率仅为8.3%。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202006/19I70182808C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921













