
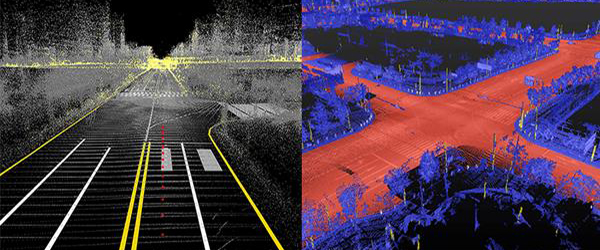
(图片来源:Naver LABS)
盖世汽车讯 据外媒报道,当地时间10月29日,韩国最大的搜索引擎网站Naver研发部门Naver LABS表示,将向公众开放其为自动驾驶汽车研发的大规模高精地图(HD)数据集,以加速自动驾驶技术的发展。
覆盖了板桥区和Sangam区的新数据集基于混合高精地图而打造,后者是一种创建高精地图的解决方案。
Naver LABS为城市自动驾驶汽车研发了一套完整的自动驾驶技术,包括创建了有关韩国几个复杂城市的高精地图,并且验证了此类地图用于定位的实用性。高精地图和定位技术是确保安全自动驾驶不可或缺的组成部分。
该公司研发的高精定位测量技术的误差只有10厘米,可在更短的时间内,大规模处理城市地区的定位,同时与配备移动地图系统(MMS)的车辆所创建的高精地图相比,准确性相当。
此外,Naver LABS还推出了ACROSS项目,一种通过探测道路布局和3D信息(如车道、停车线、道路标记、交通标志、建筑物、交通灯和街道)等,以更新现有的高精地图的解决方案。ACROSS项目通过采用安装在多辆汽车上的地图设备收集图像数据。
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/News/2019/10/31I70136060C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921













