2019年,被百度视作“Apollo计划”的商业化元年。
在发布公司Q1财报时,百度创始人、董事长兼首席执行官李彦宏曾明确表示:“百度的人工智能业务取得了突破性进展,其中,Apollo在北京的道路测试里程超出行业第二10倍以上,我们和长沙合作的自动驾驶出租车很快也将跑上街头。接下来,我们将继续抓住产业智能化机遇,进一步拓宽我们的业务领域和商业模式,加快业务发展。”
紧接着,百度Apollo公开了国内唯一的自动驾驶纯视觉城市道路闭环解决方案百度Apollo Lite。从牵手车厂合作自动驾驶解决方案,到落地长沙的Robotaxi,至今,百度Apollo商业化道路上的每一个重要节点都已初具形态。
于是,在“Baidu Create 2019”百度AI开发者大会现场,这位互联网巨头决定从Valet Parking开始讲述Apollo商业化的新故事。
百度智能汽车事业部总经理顾维灏
从解决自动驾驶“最后一公里”开始
从通俗概念上来讲,Apollo Valet Parking即指自动驾驶车辆的自主泊车(AVP)功能。
简单来说,该技术能够支持驾驶员通过在手机APP端发出指令,远程“遥控”车辆完成停车或驶出车位的动作。整个过程不需要人类参与,是一个非常典型的限定范围内低速无人驾驶应用场景。自动驾驶技术发展至今,“限定范围”和“低速”两个关键词几乎已经与商业化的可能性高度绑定。百度智能汽车事业部总经理顾维灏也在演讲中,将Apollo Valet Parking称为一款“可实现在有限条件下自动驾驶的商业化产品。”

具体而言,在产品设计方面,百度Apollo将车、云、图、场四端进行融合。其中,车端负责中、近距离内环境感知、轨迹规划和车辆控制;云端用于接收车/场端环境感知信息,融合计算全局导航路线发送到车端,完成全局调度功能;图端则提供高精地图服务;场端最后完成涂装改造,提供中、远距离环境感知能力,以补强车端感知能力。
借此,Apollo Valet Parking能够形成车云图场的综合系统优势,整套方案也将逐步完成由辅助智能到组网智能,最终到完全智能的版本迭代。虽然这种路线随着部署密度由疏到密,会面临改造成本及维护成本逐步抬高的问题。但同时,场端并不会影响方案后续拓展至停车场范围,进而Apollo Valet Parking能够借助场端的辅助增强一些新的特性,将整体操作效率提高30%,同时解决包括过弯预警、出库路口预警、T型路口预警及最优车位领航在内的关键场景。
当然,现阶段Apollo Valet Parking首要进行的仍旧是车端改造工作。车云菌获悉,团队为该方案首创了一款专属车载平台ACU-Advanced:使用单Xilinx ZU5(FPGA)设计,AI加速能力对标Nvidia Parker芯片,且成本及功耗达到更低水平,兼容百度飞桨(PaddlePaddle)深度学习框架,支持8路摄像头、12路超声波雷达、预留了毫米波雷达和激光雷达接口。
此外,ACU-Advanced计算单元能够在-40℃—85℃的温度范围内运行,最高功能安全等级的设计可以保证车辆在断电重启、安全芯片死机等极端情况下也能安全停车,并以100%全车规元器件抗冲击振动、耐电磁干扰,希望胜任各种车载环境。

ACU攻克AVP技术挑战
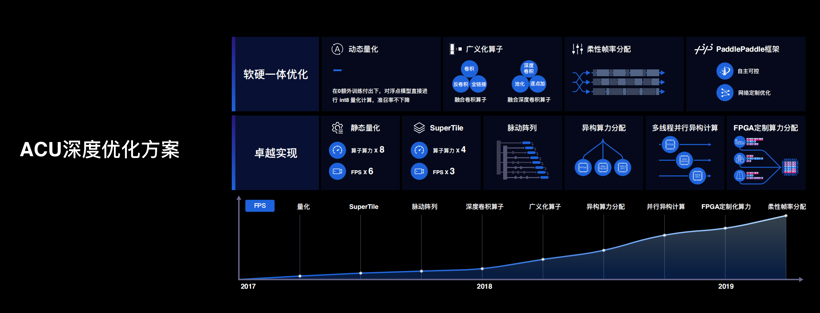
ACU深度优化方案
为了更直观地感受百度Apollo Valet Parking的竞争实力,车云菌将其与AGV方案和人工代客泊车方案进行了对比。从产品能力、软件技术、硬件技术、停车场拓展、售后能力、C端影响、B端影响几个维度探讨后发现,几套方案最主要的差异体现在软硬件技术、停车场拓展及影响力层面。
凭借人工智能基因,百度Apollo在AI和云端方面确实拥有比较突出的能力,且具备自家高精地图优势。但值得注意的是,三种方案均展现出了相当一般的售后能力。从百度Apollo的角度来看,产品尚处研发期,缺乏一定汽车实际项目和供应链管控经验。但作为一家Tier 1厂商,百度仍旧希望通过与客户,以及诸多业界一流供应商的合作共同补足短板。
所幸,有赖于公司自身具备的大规模服务能力和互联网运营经验,同时依托Apollo平台开源属性,新方案对许多客户天然就具备吸引力。早在2018年11月1日举办的百度世界大会上,李彦宏就提前公布了Apollo Valet Parking生态合作计划。
彼时,包括威马、长城、比亚迪、广汽、大众、现代在内的多家车厂以及首汽共享汽车、盼达用车、首汽约车、停简单等共享出行运营商已经在各个层面与Apollo Valet Praking展开深度合作。声势浩大的阵容不仅意在整合行业资源、统一产品接口、扩大运营规模、降低方案成本,更加能够提升方案整体社会认知,力求完成“最后一公里自动驾驶”。
现如今,百度Apollo自主泊车量产解决方案已经获得了商业化订单。作为合作伙伴,威马汽车CEO沈晖来到了智能驾驶分论坛现场,他表示:“融合智能化与电气化的新能源汽车产业是驱动中国新经济发展的引擎。创新和开放融合是头部企业必备的属性。作为推动产业智能化发展的重要力量,百度Apollo与威马汽车互为助力。两家不同领域但具备相似属性的头部企业,在今年CES-Asia共同展示了Valet Parking软硬一体解决方案。未来双方将继续联合开放L3、L4级别自动驾驶技术,打造车企智能化转型的标杆。
有意思的是,为了使产品落地的可能性最大化,Apollo Valet Parking不光拉来全产业链的生态合作伙伴,也没忘了在人机交互的体验细节上下功夫。
从活动现场Apollo Valet Parking的实际演示效果来看,在家庭或公司场景下,系统可以通过简单学习训练,使车辆在驾驶员下车后、在视距内沿固定路线泊车入位;在商场、医院等热门地点,车辆能够自动驶入停车场并自主寻找车位泊车;在实现智慧城市的机场等交通枢纽,驾驶员可以直接在入站口下车,车辆沿固定路线自动驶向周边低热度停车场并自动泊车。
显而易见,当下Apollo Valet Parking正结合未来智慧停车场应用场景,充分迎合现阶段自主泊车未被满足的安全、效率、费用需求。
开启自动驾驶商业化的“第一公里”
那么,百度为何选择从解决自动驾驶“最后一公里”来开启技术商业化的“第一公里”?
从宏观角度看,当前中国泊车市场存在巨大的未满足需求,2.7亿乘用车仅匹配约1亿个停车位,尤其在一线城市中,停车位分布不均,平均停车场有效利用率仅为45%。而在驾驶过程中,“停车难”不仅仅是新手司机的心头痛,对于熟练驾驶员而言,平均也有超过30%的驾驶时间被浪费在找车位和泊车过程中。

泊车市场现状及趋势分析
停车资源严重短缺与利用率低的矛盾中蕴含着巨大的市场需求。然而在这件事上,百度其实称不上是“排头兵”。2018年以来,受困于技术量产和商业化的难题,以Waymo为首的从业者开始唱衰无人驾驶的未来。此时,主流Tier 1和车厂提出AVP将大概率率先打破城市空间中,乘用车高级别自动驾驶的量产和商业化僵局,随后戴姆勒、博世等纷纷发布了演示Demo或是初步合作方案。
可现实是,外国方案无法解决中国泊车的痛点与市场需求。博世、特斯拉等知名大厂预计2020-2022年才会针对欧美主要场景推出高级泊车类解决方案,其适用于住宅、车库内部、公司等固定车位场景,主要用于提供固定车位自主泊车及封闭区域低速巡航的功能。
毋庸置疑,特斯拉Autopilot的出现确实引领了L2级ADAS市场高速成长,这让习惯保守决策的OEMs开始学着认可泊车市场的需求。可中国OEM却饱受供应商及整合能力的限制,现阶段只能在低级泊车辅助类产品的渗透率上做文章,难以落地高级泊车功能。
另一方面,国际OEM主导的泊车市场也难以快速起量。大众、通用预计2022年为中国市场引入融合型APA功能,这一时间点落后于本土OEM 3-4年,即便落地后,国际OEM对中国特色需求响应迟缓,也会导致泊车功能导入缓慢。
基于此,百度Apollo选择从泊车场景打造中国自动驾驶爆款产品。从数据层面来看,Apollo Valet Parking整体方案能够提高用户效率和资源利用率,平均每次停车节省30+分钟、100+元成本。
在商业层面之外,百度Apollo自然还有技术因素的考量。在功能上,AVP属于泊车辅助系统、ADAS(高级自动驾驶辅助系统)功能的升级;在技术上,则属于低速L4级自动驾驶。
在Apollo计划自身发展过程中,Valet Parking将扮演两个重要角色。从自动驾驶角度而言,封闭围栏内的低速行驶是业界公认的可以优先实现大规模商业化落地的场景,且暂时不会遇到法律法规的阻碍,AVP功能也就成了实现L4级自动驾驶的必经之路。
顺应技术整体商业化进程,自主泊车将是最先打通C端消费者与未来无人驾驶共享出行(Robo-taxi)行业的重要渠道。Valet Parking作为百度Apollo Lite的一部分,某种程度上是在为Apollo后续Robo-taxi等业务铺路,吸引合作伙伴为其助力。
换句话说,百度Apollo绝非没有野心。公司此时以“量产”为关键词加入对抗,似乎是在向全行业宣告,Apollo计划并未缺席L4级自动驾驶“预备赛”,且有足够的技术实力在未来高级别自动驾驶竞争中占领一席之地。
百度Apollo将如何续写结尾
根据市场研究机构IHS对泊车市场的渗透率预测显示,中国AVP预计将于2021年之前出现杀手级产品。
有意思的是,百度Apollo Valet Parking的版本迭代规划与上述时间节点高度吻合。今天推出的AVP版本暂不需要场端配合,可以在所有车位实现车内车外的自动泊车功能,同时车辆经过训练,能够在家和公司等固定车位完成视距内的自主泊车及召唤。
在经过场端Marker简单改造之后,百度Apollo Valet Parking将于2020年上线在公共停车场自动排队、跨层巡航找车位、自主泊车和召唤功能。最终至2022年,方案将能够在智慧城市的停车场及特定道路实现跨停车场调度、封闭快速路自动驾驶,同时借助车路协同V2X改造增强技术特性。
更重要的是,作为整个方案的主心骨,软硬件装配的量产均已提上日程。2021年,ACU-ADV传感器硬件将大规模量产,同时百度Apollo Valet Parking核心搭载的高精地图也已发展进入“下半场”。

高精地图功能安全
顾维灏介绍称,凭借专业的测绘和众包更新,百度高精地图可实现全自动三维重建,并实时更新地图鲜度,精准度也达到厘米级别。不仅如此,百度Apollo也获得了社会和企业的高度认可:在2019年,百度Apollo获得了中国第一个全车道要素的高精地图审图号,并成为2022年北京冬奥会自动驾驶公安经地图唯一承担单位。可以说,百度Apollo高精地图在业务规模及客户反馈层面基本已经得到业界认可。
就以上几个维度而言,在中国泊车市场杀手级产品出现之前,百度Apollo Valet Parking的量产恐怕不再会有太大阻碍。而一旦这项全新技术能够顺利成为百度Apollo自动驾驶爆款产品,基于AVP之于L4级功能的时代意义,百度Apollo或许将亲手开启自动驾驶产业的iPhone时刻。
本文地址:https://auto.gasgoo.com/News/2019/07/040756585658I70114068C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921