

1月25-26日,2018全球自动驾驶论坛在武汉·中国光谷举办,本次论坛以“启发创新·开放共享”为主题,会议期间,武汉理工大学智能交通系统研究中心胡钊政发表了主题演讲,演讲内容如下:

武汉理工大学智能交通系统研究中心 胡钊政
大家好,我来自武汉理工大学智能研究中心,我汇报的是智能网联的交通系统,我从交通系统来谈一下智能网联汽车,我的报告分四个部分:
一是智能网联汽车与智能网联交通
二是武汉理工大学在智能网联方面的平台和工作
三是基于V2X的车路协同感知与控制
四是报告总结。
汽车和交通是两个不同的系统,汽车是交通系统的一部分,我们谈交通都是谈人、车、路三个部分。我们的论坛是汽车,主题和交通密切相关。虽然汽车和交通是两个不同的系统,但是我们可以用系统的方式来描述,比如汽车有约束、状态、控制。交通同样有状态、约束、控制,只是它的约束、控制和状态不一样。智能汽车,我们可以用系统的角度来描述汽车和交通,我们把它整个的过程描述出来之后有三个部分组成,一是数据部分,二是决策部分,这是汽车核心部分。三是控制部分,这个交通一样有,交通需要感知各种各样的数据,交通流、车辆信息、人流信息,同样还有决策,红绿灯的控制,在决策基础上做一些控制系统。智能到底起到什么作用?从数据到决策,这是做深度学习、AI的基本模式,原来的决策是基于人工的法则、经验,现在很多的做法,从数据到决策,通过学习,通过海量数据得到这些东西,来做决策。

从智能网联汽车到智能网联交通,是一个过渡的过程,智能网联汽车在学术界一个新的名词,汽车的发展有两个维度,一个是网联化,一个是智能化,两者相互配合才能让智能网联汽车向前推进。
智能交通中心,是我们学校2000年成立的中心,最开始做智能交通,后来发现智能交通和车联网有密切关系,这两个重合以后是协作的智能交通系统,我们起了一个名词叫智能网联交通系统,这也是这个领域慢慢兴起的一个词。 武汉理工大学在智能网联交通的平台,到现在有20年的历史,目前整个中心有一个国家工程技术研究中心,教育部的工程技术研究中心,和一个重点实验室。
智能网联交通系统分为三个组成,人、车、路,主要是让车子变得智能化,基础设施,人到底起到什么角色?有一些交通设施能否支持我们做自动驾驶和决策。如果我们用很差的交通系统设施,不可能做智能网联汽车,人现在面对自动驾驶,需要涉及一些法律,甚至有一些涉及到伦理的问题,面对智能网联时代,不仅要考虑车子,还要考虑到基础设施和人。这是我们对交通系统和智能网联的阐述。
这是我们学校做的车路协同的平台,这个平台来自国家863计划,智能车路协同关键技术研究,我们武汉理工大学承担了比较重要的任务。典型的是V2V、V2I的功能,我们车子有不同传感器、通信的功能,在交叉路口也有各种各样的传感器,有摄象头、信号灯,通过通信的DSRC的系统将信息共享,这样交通变得更加安全和有效。这一部分是武汉理工大学参与的863做的车路协同的示范区,这个地方是在廊坊,有车队,也有一些典型的车路协同的运用场景,有15项车路协同的运用功能,完成了一些系统的演示方案和体系框架。特别要提到的,最近在武汉东湖高新做了车联网的示范,这是它的系统框架,在座的各位非常熟悉,基本上是RSU+VU+交通管理功能,和交通要素进行连接,进行信息共享,进行了一些新的控制手段和方法。这是东湖高新车联网的示范点,在珞瑜路做了点,我们主要是做车辆引导,十字路口怎样有效地通过,预警、交通流量控制等。我们做了一个手机APP,把所有的信息通过手机端显示。图的右下角有基本的交通引导和交通预警的功能,这是目前我们正在做的一个项目。
同样,我们也做了一些智能车的平台,这个是863项目结束以后,把它改成了一个智能车的模型,加上了激光雷达、摄象头和高精度惯导。目前我们做的比较多的是2016年做的比亚迪e5的纯电动车,这个车子也可以做自动驾驶的控制。这是我们武汉理工大学在智能网联技术的平台。
基于V2X的车路协同感知与控制,一是基于V2X的交通信号灯的控制,二是基于V2X的交通环境感知,三是停车场的监控。
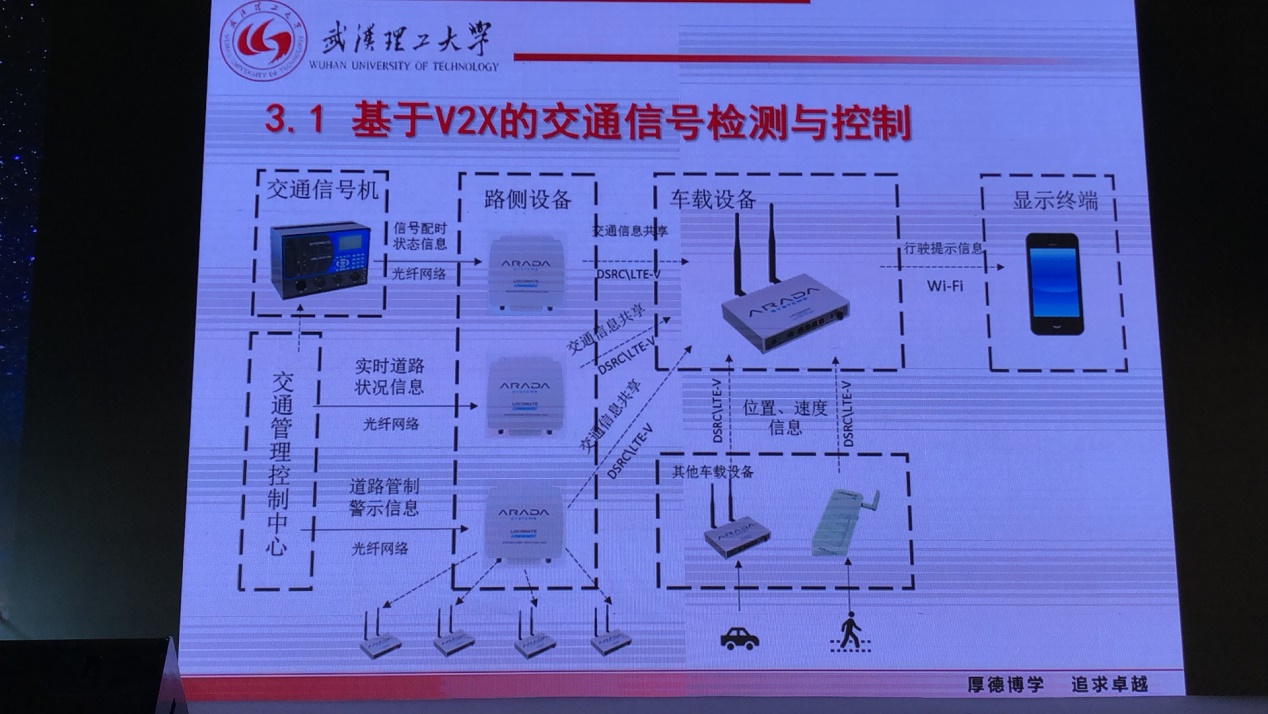
一是基于V2X的交通信号检测,70%的事故是在红绿灯的交叉路口,这个问题可以得到很好解决,直接把信号灯的信息接收到,直接发送到车载终端。这个系统的框架以这个图为例,包括路侧设备,车载设备、信号灯,交通控制系统,wifi的手机终端显示。
这是我们基于V2X的车速控制和引导系统,我们通过信号灯的信息对车子进行很有效地引导,包括车速、提高安全性、高效性、经济性,如果我们的车子是自动驾驶的车子,可以直接控制我们的车子以比较快的速度,安全性地经过十字路口。这是一个典型的红绿灯的控制系统,有左拐、直行和右拐,控制很简单,一个方向对应一个红绿灯,如果是红色表示不能通过,绿色表示能通过。武汉地区很多红绿灯进行了改造,哪怕是在同一个方向,比如说都是直行,可能不是用一种红绿灯,是多种红绿灯。前面讲的基于V2X的红绿灯入口的引导,但是有一个核心的技术,要实现这种引导必须要做车道定位,如果车子在直行的车道,推送的是左拐,就导致一个很大的问题,不仅不能提高交通安全,甚至会导致严重的后果。这个是在自动驾驶非常基础的问题,目前我们做车道级定位,一是从设备方面IMU+GPS/DGPS+高精度地图,这样比较贵。二是算法层面计算机视觉+人工智能,这样难度比较高。我们提供了一个方案是车道线编码,左边是一个正常的车道块,每一块都长得一样,没有区别到底是哪一块,导致我们只能做横向定位,做不了纵向定位,在交叉口是一个很重要的问题,如果我们对车道线进行编码,编码的方式有很多种,可以颜色编码、纹理编码、长度编码,这样的好处是可以在三个模块里面找到编码以后的块,这样可以有很大的潜力解决交通的定位问题,特别是车道定位问题。比如我们有一个GPS定位是10米左右,可以在10米以内找到定位的块,然后可以和定位的地理位置信息算出来,这样就可以得到测量精确的信息。车道线改造是一个复杂的过程,我们找了一个人比较少的路做了一些颜色的改造,做了基本的试验,这是试验的结果,精度是小于1米的范围。这是解决车道定位很有效的方案,如果我们的基础设施能够匹配自动驾驶,对自动驾驶的问题可以得到很简单、很有效的解决方案。
基于V2X交通环境感知,现在感知层面,对性能要求非常高。我们可以把目标分为静态目标和动态目标。静态目标包括车道线、交通标志。交通标志非常多,在美国定义的交通标志有600多种,国内也有很多种。另外,环境复杂度非常高,自动驾驶是一个典型的室外的开放环境,很多时候信号灯或者标志看不到,所有的算法都会失效。还有破损情况严重,对算法的性能要求非常高,从单车角度,要解决这些问题很困难,还没有交通标志检测的算法,能够完整地把问题解决。
基于V2X的道路目标检测可视化,目前这个公式是投影的公式,我们把主要的目标,车道线投影到大屏幕上去,右边是K,R和T是自动驾驶的时候车辆的位置信息,这是静态目标在地图里的标志,地图里面都会把交通要素标注进去。我们可以把地图里面所有的静态目标全部都投影到当前的图象里面去,左边的图不是一个实时检测的效果,是投影的效果,不管我们有100种、1000种,甚至更多的目标都可以用同样的方法解决。
智能车的定位问题是自动驾驶非常重要的问题,解决起来难度、成本很高。我们做基于高精度世界地图标准,我们学校做了一些科研性的工作,可以对场景进行表达,一个场景进来以后,可以把它的feature做出来。
另外还有3D的场景信息,进行四维定位以后会有很多路况信息,同时还可以给到车辆的轨迹信息。通过场景本身的信息,形成一个匹配,之后获得高精度车辆位置信息。这里面很核心的问题是每一个场景怎么表征?每一个地方都有独特的特性,如果把这个独特的特性抓住之后,下次找到这个地方自动匹配,匹配完之后会得到一个信息,通过这个场景对应的三维可以把位置信息算出来。我们做的主要是定位结果,包括图象比定位,最后的定位结果用现在的方法来做,基本上是30公分左右,标准差在38公分。目前起码可以满足车道定位,现在我们正在做一些优化,把精度做得更高一点,包括雷达和图象数据融合。
地下停车场的智能交通系统,这是每个人碰到的问题,我的车停在哪里,在哪里找车。如果智能化以后,车子可以自动化走,只要告诉我当前的位置,可以让车子自动来接我,从人寻车的问题变成车寻人的问题。这里面要解决的一个是人员的定位问题和智能车的定位问题。大家可以回忆一下,目前我们看到各种各样的车厂,还有一些科技公司做的接泊车,大部分是室外的环境里面,因为室外有GPS信号,室内GPS信号是没有的,做起来更复杂。这里关注的是人员定位问题,很多人是不能接受的,比如戴手环的方式,绝大部分能接受的方式是用手机来定位。当时我们把所有室内定位的方法梳理了一遍,最后挑选了一个独特的方法,也是我们首创的方法,在地下停车场环境下会有安全出口的标识,安全中国的消防法必须要有这种标志,而且分布的密度有相关的规定,我们很容易找到这样的标志,如果以这个标志为核心,再加上把这个标志作为wifi信息,它自身视觉的信息。把它作为场景的信息综合起来,最后形成wifi和视觉结合的指纹,我们把出口标志当成二维码来扫,只要扫了二维码可以把视觉信息算出来,根据地图匹配马上得到定位。这里涉及到制图,把所有的信息采集起来,另外是定位的信息。我们在武汉市很多场所做了一些实验,最开始是在学校的航海楼,它的wifi非常复杂,还有奥山世纪城,3楼、1楼。这是我们做的定位对照试验的结果,我们的误差是30公分左右,1米是一个坎,如果比一米还少难度比较大,无论是从时间消耗还是定位结果都是很好的结果,误差小于1米的结果占比是96%。

我们是搞交通的,更习惯从交通的角度谈自动驾驶的问题,汽车只是交通里的一个环节,汽车的发展,三个要素一定要匹配地发展,仅仅是从汽车的一个角度,单纯用传感器、算法,成本非常高,如果基础设施能够匹配,在示范区做一些优化的设计,最后形成类似于二维码的设计。二是运用交通智能平台,三是运用位置服务,位置服务很核心的是高精度定位,定位得越精确,推送的位置服务越精准,如果位置不精准,不但不会提高交通安全,反而会出现灾难性的后果,我们的所有应用都是通过定位这个核心去展开的。谢谢大家!
提示:“本文根据发言整理,未经嘉宾审核!” 如需转载或引用,请联系徐先生(021-39197820)
针对本次会议,盖世汽车进行全程直播,欲了解更多详情可关注以下专题链接:
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/News/2018/01/2604071571570033221C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921













