在2026年的智能驾驶江湖,大家都在卷什么?
如果还停留在“卷价格”的上一个时代,那可能我们已经看不懂当下的棋局了。在刚刚结束的禾赛2020技术开放日上,一个全新的信号被释放出来:激光雷达正在经历一场从“几何感知”到“物理成像”的质变。
禾赛联合创始人 & 首席科学家孙恺在演讲中抛出了一个极具颠覆性的观点:“具备摄像头成像水平的激光雷达正在成为现实。”

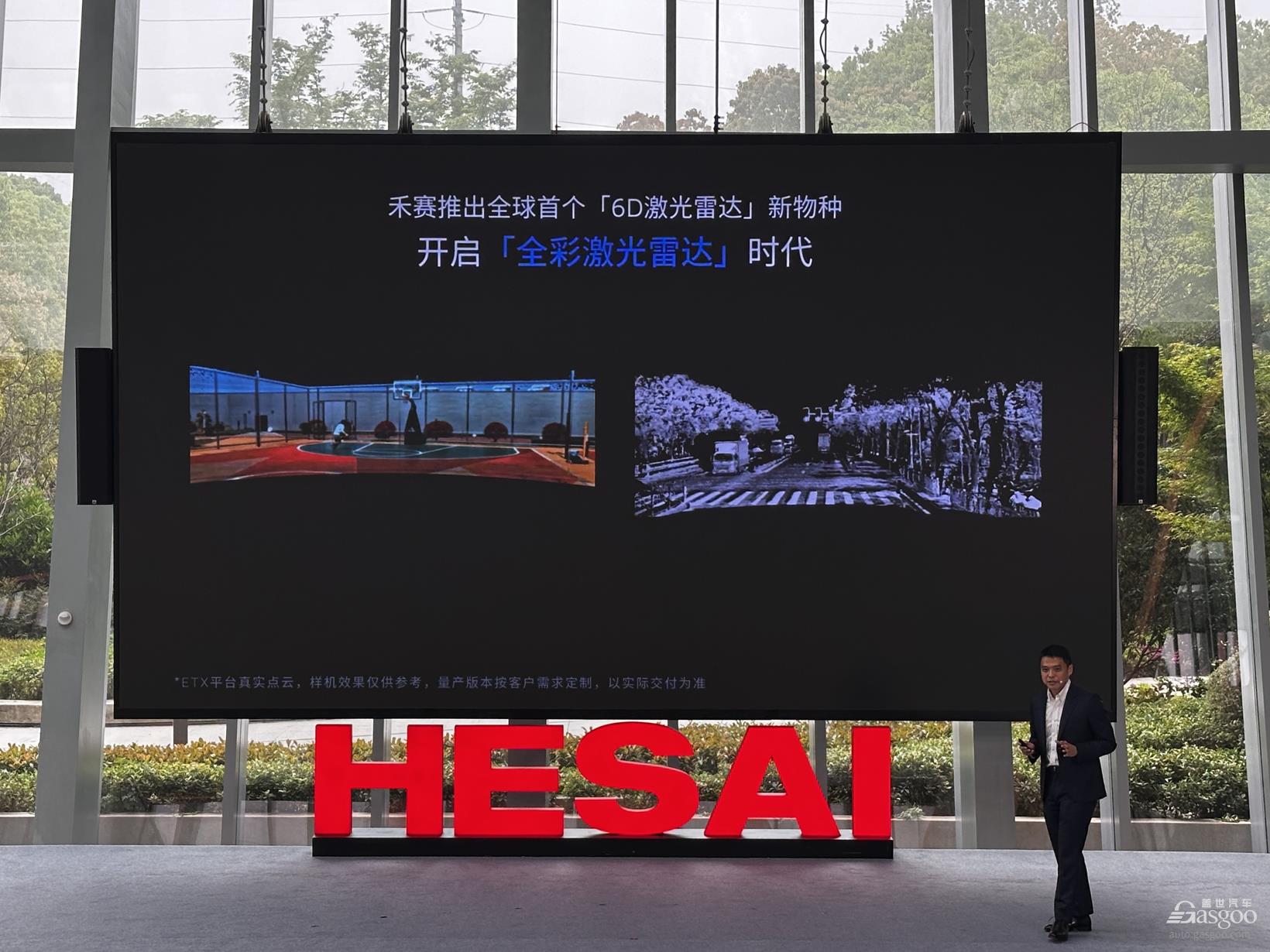
这句话背后,是禾赛全球首发的“毕加索(PICASSO)”芯片平台,以及基于此打造的全球首款6D全彩激光雷达ETX。
为什么要给激光雷达装上“摄像头的像素”?
“这个世界本质上是三维的,但过去因为技术限制,我们只能用2D摄像头去记录。”孙恺在演讲中的这句话,道出了自动驾驶感知领域最大的痛点——信息的丢失。
长期以来,行业里一直存在着“激光雷达派”和“纯视觉派”的争论。激光雷达擅长精准测距,构建3D骨架,但缺乏颜色和纹理,看不懂红绿灯的语义;摄像头擅长捕捉颜色和细节,但缺乏深度信息,且受光照影响巨大。
于是,我们看到了一种“缝合怪”式的解决方案,把激光雷达和摄像头物理拼凑在一起。
但这种方案存在天然的缺陷:时空不同步。
空间上: 两个独立的硬件,像素点无法完全对齐。雷达的一个点打在了路牌上,摄像头的像素可能因为视差刚好拍在了路牌后面的空气上。
时间上: 两个独立的快门,采集频率不同步。对于高速运动的物体,这种微小的时间差可能导致感知错位。
为什么要给激光雷达装上摄像头的像素?答案是为了“融合”。
当感光元件不再是传统的图像传感器,而是SPAD(单光子探测器)时,奇迹发生了。SPAD Image Sensor + SPAD Depth Sensor的深度融合,让每一个像素点既能测距(XYZ),又能感知颜色(RGB)。
这就是禾赛定义的“6D”,也就是3D空间结构加上3D色彩信息。
想象一下,在一个漆黑的夜晚,传统的摄像头可能因为噪点太大而看不清路况,而纯激光雷达虽然能画出轮廓,却分不清哪里是深坑,哪里是路面。但有了“毕加索”芯片的“超感光”能力,激光雷达在夜间也能像白天一样清晰成像,且自带精准的深度信息。
这是一种“降维打击”。它让激光雷达不再是一个单纯的“测距仪”,而变成了一个“全时域的3D相机”。它不再需要依赖外部的摄像头来补全颜色信息,它自己就能完成对世界的完整描述。
正如孙恺所言,这不仅是技术的突破,更是为了未来十年3D头显设备普及后的沉浸式体验做铺垫。当我们的下一代出生时,记录他们成长的将不再是2D视频,而是带有真实色彩和深度的6D全彩点云。
禾赛为什么要现在做这件事?
如果说第一部分解决的是“技术必要性”的问题,那么第二部分我们要探讨的是它的战略考量是什么?
答案或许在于禾赛推出的ETX系列和Kosmo业务中。
在“毕加索”芯片的赋能下,禾赛推出了ETX平台,最高支持 4320 线全彩 4K 超高清感知,最远测距距离600m,可识别150m内15cm*25cm小木块。
而量产,就在今年下半年。
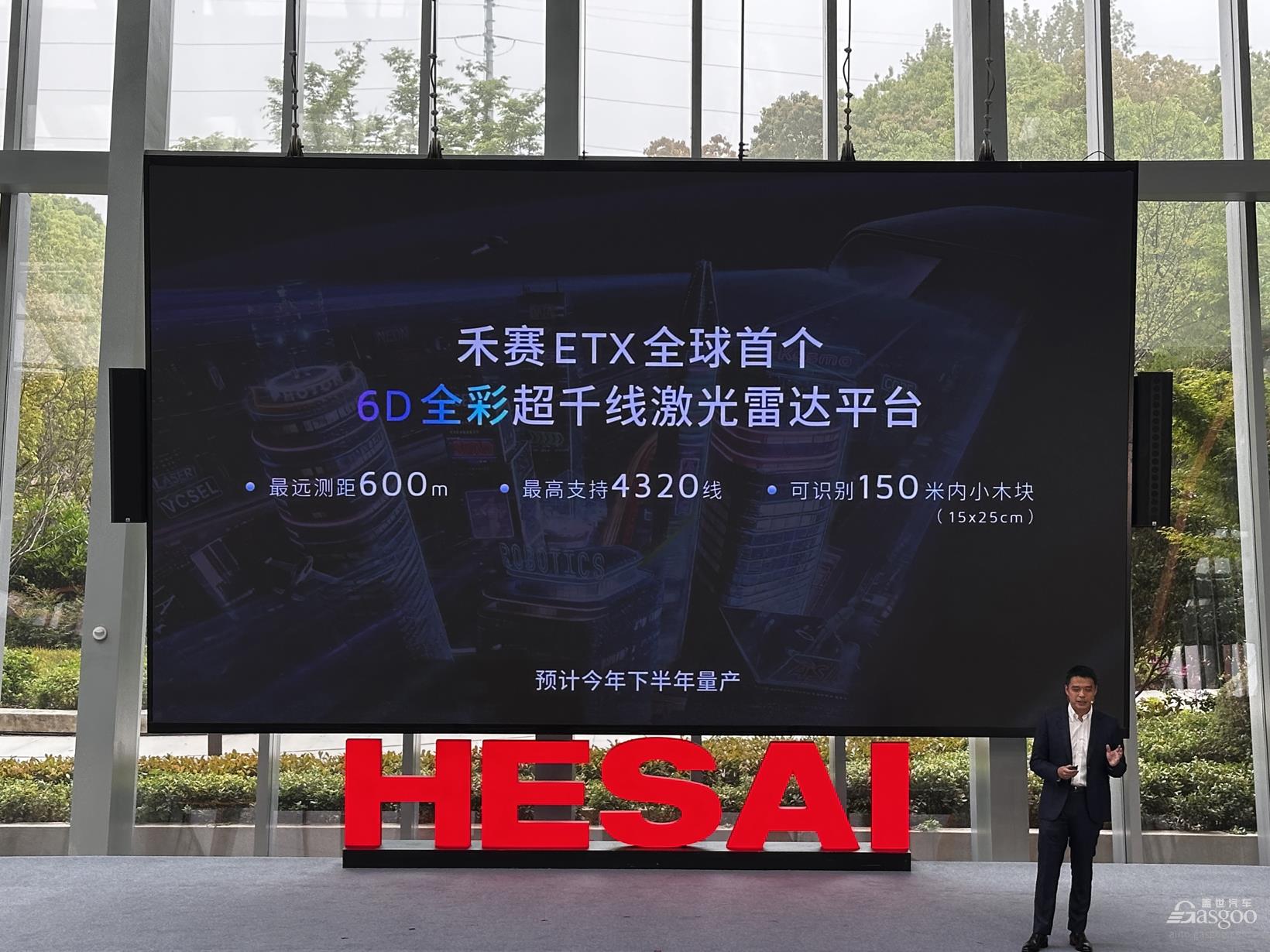
为了让大家有概念,孙恺做了一个对比:500线雷达通常对应300米测距。ETX能做到600米,意味着在高速场景下,车辆有更长的反应时间。而超千线分辨率并不是重点,重点在于它在拥有超高线数的同时,实现了全彩成像。
这也就意味着,在L3甚至L4的自动驾驶架构中,激光雷达不再是摄像头的“备胎”,而是核心决策传感器。当系统需要在极端场景(如强光、暴雨、黑夜)下做出刹车或避让决策时,只有同时具备XYZ和RGB信息的传感器,才能提供最可靠的冗余。
另一个产品则更有意思,如果说ETX是解决当下的车,那么Kosmo就是解决未来的机器人。

图片来源:禾赛
在开放日上,禾赛科技的联合创始人、首席执行官及董事会主席李一帆透露了一个重要的战略转向:当激光雷达的技术做到“差不多”的时候,为什么不用它去解决其他问题?
Kosmo正是基于“毕加索”这类高保真3D记录能力而诞生的。它不仅仅是一个硬件产品,更是一个数据采集工具。
李一帆在回答关于“世界模型”的问题时非常坦诚:“我们并不是因为‘世界模型’火了才去做这个产品,而是我们在开发过程中发现,这种能极高保真还原三维空间数据的记录方式,恰好是‘世界模型’训练所需要的。”
无论未来的AI大模型路线如何演进,无论“世界模型”是否会成为主流,拥有对物理世界最精准感知能力的硬件,永远是核心资产。 禾赛通过Kosmo,试图将激光雷达的应用边界从汽车扩展到具身智能机器人,从单纯的导航避障扩展到对物理世界的语义理解和重建。
激光雷达的终点在哪?
聊到这里,大家可能会有一个疑问:既然ETX能做到4320线,那是不是意味着未来的激光雷达要无止境地“卷”线数?
答案是否定的。
“500线的激光雷达,它对应的测距能力是300米,这是一个比较合理的指标。”孙恺如是说。这也进一步点明一个关键信息——线数的边际效应——线数(分辨率)和测距能力必须是匹配的。
如果线数很高,但测距不够: 比如你有2000线,但只能看100米。那么在100米开外,这些高线数就失去了意义,因为你根本打不到远处的物体。这时候,高线数只是一堆没有用的数字。
如果测距很远,但线数很低: 比如你能看600米,但只有16线。那么远处的物体可能只有一个模糊的轮廓,无法识别细小的障碍物(如轮胎、低矮路障)。
孙恺的观点非常直接,线数不是唯一的指标,甚至不是最重要的指标。
所谓的“千线”“万线”,本质上是为了看清远处的细小物体。如果测距能力跟不上,单纯堆砌线数就是“伪需求”。在禾赛看来,真正的重点在于全要素感知与“隐形”安全。
那么,激光雷达的终点究竟在哪?
结合李一帆和孙恺的观点,终点或许有三个维度:
第一维度:性能的“甜点区”(Sweet Spot)。
正如孙恺所说,线数和距离要成正比。未来的激光雷达不会无限堆砌线数,而是会寻找一个“够用且安全”的平衡点。对于前向主雷达,这个平衡点可能是1000-2000线配合300-500米的测距;对于补盲雷达(FTX),则是超广视场角(180°)配合中短距离的高帧率。
第二维度:从“传感器”到“安全气囊”。
李一帆提到,激光雷达在L2+阶段是“冗余”,但在L3/L4阶段是“多系统决策”。未来的激光雷达,其定位将从“辅助感知”进化为“隐形安全气囊”。它可能平时不发声,但在摄像头失效的极端场景(如逆光、黑夜、暴雨)下,它必须能一锤定音,保证刹得住。这种“极端场景下的可靠性”,才是衡量激光雷达价值的终极标尺。
第三维度:体积的极致压缩与无处不在。
孙恺在演讲中描绘了一个极具想象力的未来:当“毕加索”这样的芯片技术成熟后,激光雷达的体积可以缩小到“拇指大小”。
这也就意味着激光雷达将突破汽车的边界,进入手机、眼镜、智能家居。当它变得像摄像头一样无处不在时,它就完成了从“昂贵的自动驾驶套件”到“人类视觉延伸”的终局进化。
行业变局与“黎明前的黑暗”
最后,我们不得不把目光从技术拉回到残酷的商业现实。
正如地平线CEO余凯在圆桌论坛上所说,行业正处于“黎明前的黑暗”。
虽然禾赛交出了一份令人艳羡的成绩单(2025年全年营收30.3亿元,全球首家全年GAAP盈利,市占率连续13个月第一),但整个行业依然在经历残酷的“价格战”。
为什么还要做ETX这种“昂贵”的高性能产品?
李一帆的回答非常犀利,他用了一个“牛排与牛排酱”的比喻。没有好厨子,就不需要顶级牛排;没有顶级牛排,厨子也难为无米之炊。智驾的拐点,就是硬件与算法“双向奔赴”的时刻。
现在的消费者买智驾,很多时候是“够用就行”(Good enough)。但当L3、L4真正到来,当用户愿意为“灵魂伴侣”般的智能体验买单时,他们需要的是“无感”和“极致安全”。
那时候,只有具备6D全彩、超远距、高可靠特性的激光雷达,才能支撑起那个“丝滑”的智驾体验。
回到最初的问题:激光雷达的终点在哪?

图片来源:禾赛
禾赛的答案是,它不在某个具体的线数上,也不在某个具体的探测距离上,而是在成为物理世界与数字世界之间,那座最忠实、最清晰的桥梁。
当激光雷达拥有了像人类一样感知色彩和深度的能力时,自动驾驶的“眼睛”才算真正睁开。
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/news/202604/18I70454287C601.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921