盖世汽车讯 想想人类膝盖的奇妙物理结构。作为人体最大的铰链关节,它由两块圆形的骨头组成,通过韧带连接,不仅像门一样摆动,还能相互滚动和滑动,使膝盖能够弯曲、伸展和保持平衡。
据外媒报道,哈佛大学约翰·A·保尔森工程与应用科学学院(Harvard John A. Paulson School of Engineering and Applied Sciences,SEAS)的研究人员设计了一种新的机器人膝关节设计方法,称为滚动接触关节。这种方法有望带来更优秀的机器人抓取器、更适合人类的辅助设备,以及像动物一样优雅移动的机器人。
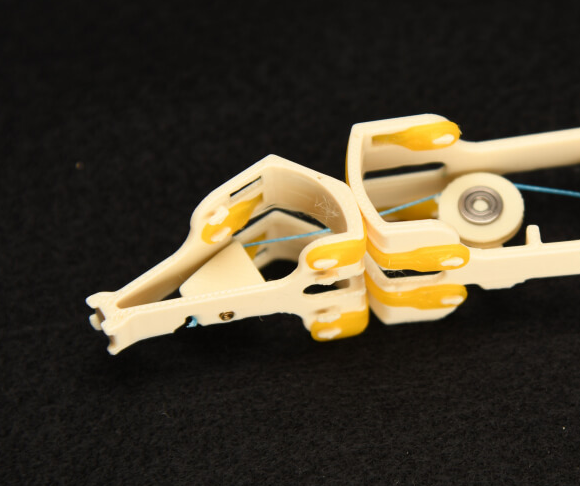
图片来源:哈佛大学
这项发表在《美国国家科学院院刊( Proceedings of the National Academy of Sciences)》上的新设计方法优化了滚动关节在计算机上的设计方式。它通过同时调整关节每个关键部件的形状,使其与所需的力或应用相匹配,例如机器人抓取器的末端或类人机器人的肢体。
“每当你设计一个机器人,并且知道它需要做什么——比如一个步行机器人——你就可以开始思考如何最有效地输出力,”SEAS博士生、该研究的第一作者Colter Decker说道。“例如,对于步行机器人来说,你可能需要在步幅末段施加更大的力来蹬地。如果我们能将这些决策融入到机器人自身的机械结构中,就能制造出更高效的机器人。由于能量被精准地分配到所需位置,它们可以使用更小的执行器。”
“我们努力将机器人设计与任务和控制紧密结合起来,”该论文的资深作者、SEAS哈里·刘易斯和玛琳·麦格拉斯教授Robert J. Wood说道。“我们的目标是将尽可能多的运动控制工作交给机器人的机械结构和材料,以便控制系统能够专注于任务层面的目标。科尔特的方法正是如此,而且无论从数学上还是机械上来说,都以一种非常优雅的方式实现了这一点。”
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202602/4I70445663C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921