盖世汽车讯 据外媒报道,由韩国韩国大邱庆北科学技术院(DGIST)移动技术部(Division of Mobility Technology)Sang-dong Kim和Bong-seok Kim领导的研究团队,与韩国海军大学(Republic of Korea Naval Academy)Youngdoo Choi教授领导的研究团队合作,开发出基于外推法的调频连续波雷达多普勒分辨率增强算法。该算法能够提升系统性能,其性能优于现有的超高分辨率技术。
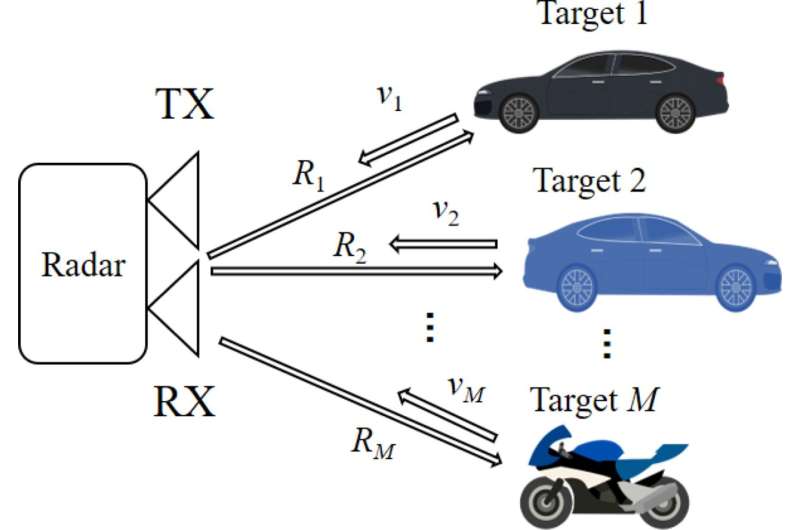
图片来源: 期刊《Journal of Electrical Engineering & Technology》
这项研究引入了一种无需额外复杂计算或硬件即可提高雷达探测精度的技术。该技术有望提升无人机、无人舰艇和自动驾驶车辆等各种智能无人平台上的雷达系统性能。
传统雷达系统通过分析多普勒效应来确定目标速度,但基于快速傅里叶变换(FFT)的方法在分辨率(即速度分辨精度)方面存在局限性。为了解决这个问题,DGIST与ROKNA联合研究团队应用了一种信号外推技术,并提出了一种新的算法,该算法在不增加观测时间的情况下提高了多普勒分辨率。
所提出的方法成功地将速度估计的均方根误差降低了高达33%,并将目标漏检率降低了高达68%,与传统方法相比有了显著的改进。值得注意的是,所提出的方法与传统的FFT方法保持了相同的计算复杂度,从而同时实现了快速的处理速度和高效率。
这项技术能够有效解决目标以相近速度运动时信号重叠的问题,尤其适用于无人机或雷达系统同时探测多个目标的情况。因此,它能够显著提升对近距离目标的区分能力,提高探测精度,标志着高分辨率目标探测技术发展的一个新里程碑。
此外,该技术无需额外硬件资源,且计算结构简单,可实现实时应用,因此备受工业界的青睐。
移动技术部的首席研究员Sang-dong Kim表示:“这项研究展示了雷达信号处理效率和精度的提升,无需额外设备即可实现更精确的目标探测。预计这项技术将发展成为国防、自动驾驶和无人系统等领域的关键技术。”
这项联合研究由DGIST研究团队与ROKNA团队共同完成,并得到了DGIST机构项目和ROKNA海洋研究所学术研究项目的资助。研究成果于2025年11月发表在期刊《Journal of Electrical Engineering & Technology》上。

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202511/12I70436940C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921