

盖世汽车讯 尽管机器人专家在过去几十年中推出了越来越先进的系统,但大多数现有机器人仍无法像人类一样灵活地操控物体并具备感知能力。这反过来又对它们在各种现实任务中的表现产生了不利影响,从家务到自然灾害后的废墟清理,再到装配或执行维护任务,尤其是在钢厂和铸造厂等高温工作环境中,高温会显著降低性能并降低安全操作所需的精度。
图片来源: arXiv预印本服务器
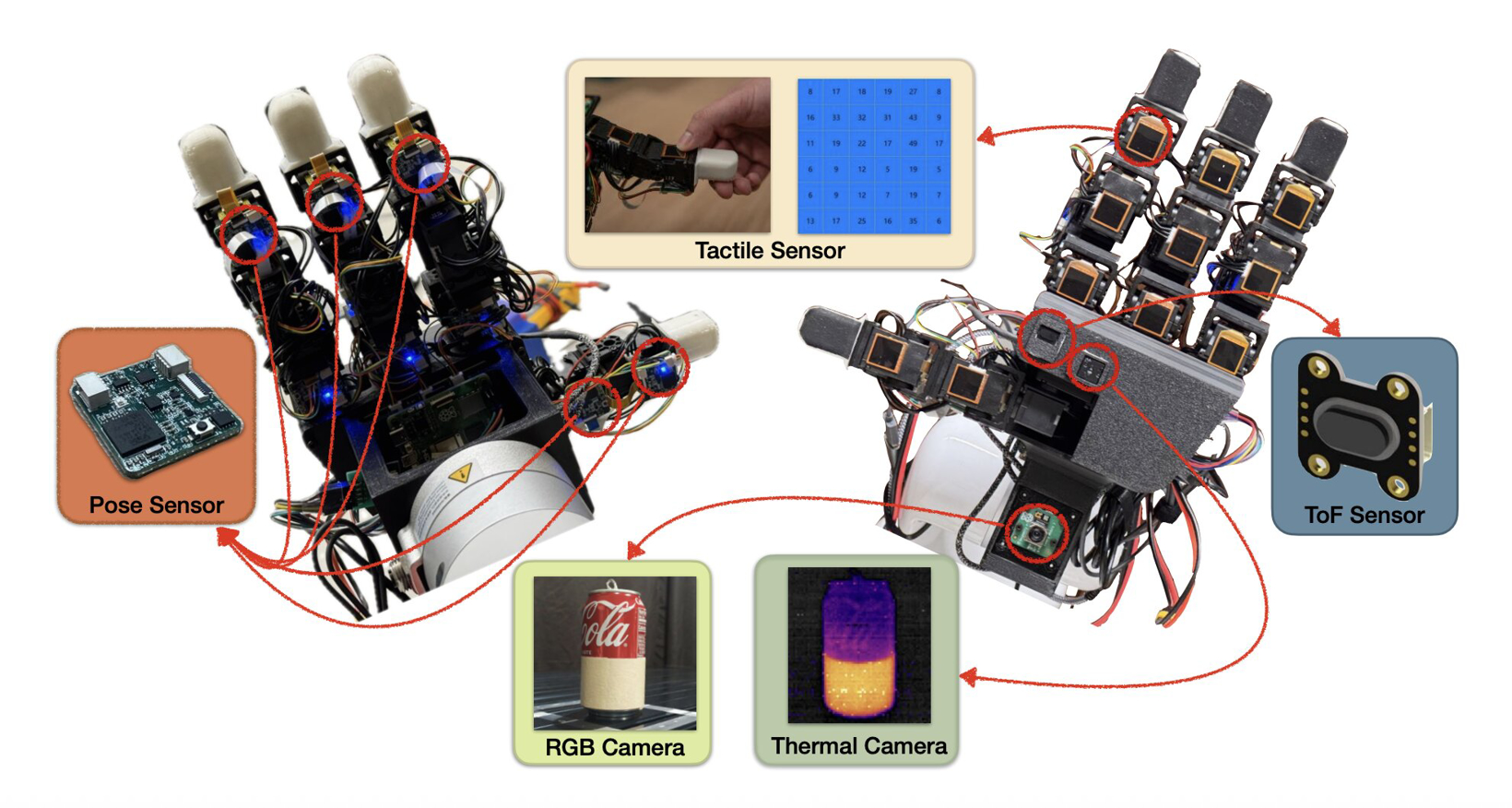
据外媒报道,南加州大学(University of Southern California)的研究人员最近开发出MOTIF(Multimodal Observation with Thermal, Inertial, and Force sensors,基于热、惯性和力传感器的多模态观察)机械手,这是一种可以提高人形机器人操控物体能力的新型机械手。这项创新成果发表在arXiv预印本服务器上的一篇论文中,它采用了多种传感设备,包括触觉传感器、深度传感器、热像仪、惯性测量单元(IMU)传感器和视觉传感器。
“我们的论文源于对机器人操控超越传统视觉和触觉感知的需求,”研究人员Daniel Seita、Hanyang Zhou、Wenhao Liu和Haozhe Lou表示。“目前的多指机械手通常缺乏执行复杂任务(例如热感知和灵敏的接触反馈)所需的集成感知能力。”
这项研究的主要目标是开发一种新型多功能、多模态机械手,其灵感源自人类的手,能够安全而精确地处理物体。通过利用更全面的传感器输入,他们创造的机械手可以在从家庭到工厂的各种环境中执行更细致的物体交互。
“最初最直观的想法是探索如何设计出更贴近人类日常感知体验的系统。我们受到了人类行为活动的启发,”研究人员解释道。“我们之前使用过几款市售的机械灵巧手。我们意识到,许多现有的硬件设计侧重于机械传动结构,而我们直接购买的产品无法满足我们许多研究想法的感知需求。这段经历促使我们寻求一个可DIY扩展的硬件平台,让我们能够根据自己的设想设计和改进设备。”
研究团队解释说:“MOTIF手是一款先进的机械手,它将多种传感器——热传感器、深度传感器、RGB(视觉传感器)、惯性传感器(IMU)和触觉传感器——集成到一个灵巧的平台上。它扩展了广泛使用的LEAP手设计,增强了传感能力。其主要优势包括全面的环境感知能力、安全处理高温物体的能力,以及区分外观相似但物理特性不同的物体的能力。”
为了评估MOTIF手的潜力,研究人员在实验室环境中进行了两项不同的实验。第一个实验旨在评估机械手在考虑物体温度的情况下抓取物体的能力,以避免触碰物体表面过热的区域。
第二个实验涉及操控形状相同但重量不同的物体。为了对物体的质量进行分类,机械手在抓握物体时会进行简单的指尖轻弹动作。
“我们研究最显著的成果是将多种传感器集成到一只灵巧的机械手中,显著增强了其操控能力,”研究人员说道。“我们的研究结果表明,热传感与三维重建相结合可以有效引导安全抓握,而惯性传感则可以对物体的质量进行精确分类。”
在初步测试中,该研究团队推出的机械手表现优异,能够安全地抓取各种物体,同时还能精准地预测其质量。未来,MOTIF机械手可以进一步改进,并在更广泛的实验中进行测试,以验证其在特定应用领域的潜力。
Seita和他的学生认为,该机械手在处理家庭环境、专业厨房和工业环境中的手动任务方面尤其有前景。由于该机械手能够安全地处理高温物体并以良好的精度进行操作,因此它在烹饪热菜、焊接或拧紧螺丝等方面的表现都可能优于其他现有系统,因为这些任务需要精确估计力,并根据物体温度调整操作策略。
“未来,我们计划通过集成更多高分辨率指尖传感器(例如Digit 360)来进一步增强MOTIF手的功能,从而提供更精细的触觉反馈,”研究人员补充道。“我们还致力于改进我们的多模态感知算法,并探索其在复杂现实环境中的更多应用,例如高级手部操作任务以及需要复杂热力和力相互作用的环境。”
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202507/22I70429562C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














