一、概念阶段的核心框架与开发模型
汽车功能安全概念阶段是ISO 26262标准中“Part 3”所规定的关键环节,其核心目标是通过系统化的流程定义相关项、分析风险并设计安全方案,为后续的系统开发、硬件与软件设计奠定基础。从标准框架来看,概念阶段主要包含三个核心活动:相关项定义(Item Definition)、危害分析与风险评估(Hazard Analysis and Risk Assessment, HARA)以及功能安全概念(Functional Safety Concept, FSC)的制定。这些活动贯穿于产品的安全生命周期,是确保车辆功能在异常状态下仍能避免不合理风险的关键。
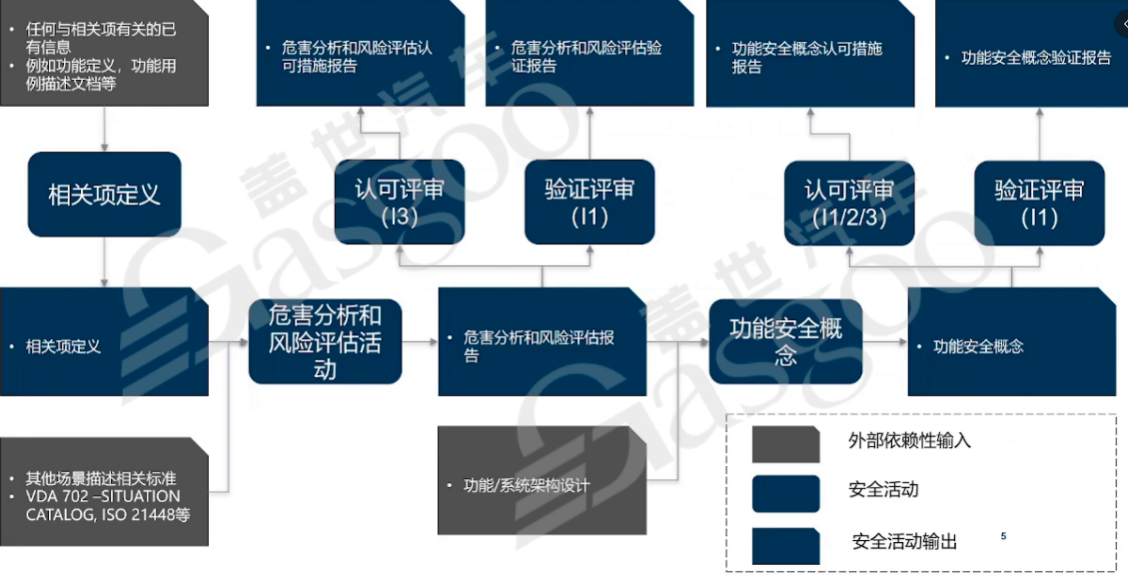
概念阶段的开发模型呈现L型流程走向,具体可分为四个核心步骤。首先,需收集与相关项有关的所有已有信息,包括功能定义、用例描述、产品设计文档等,通过梳理形成“相关项定义”文档。这一步是后续所有分析的基础,其输出的准确性直接影响风险评估的有效性。其次,基于相关项定义开展HARA活动,该过程需依赖外部输入,如VDA 702(场景分类标准)、ISO 21448(预期功能安全)等,最终输出危害分析与风险评估报告。由于HARA的结果将直接决定下游供应商的安全等级要求,因此该环节的评审需满足最高的独立性等级(I3),即由不同机构的非利益相关方进行审核,以避免因利益关联导致的风险误判。
在HARA活动之后,需结合功能或系统架构设计,将风险评估得出的安全目标转化为具体的功能安全概念。这一过程的核心是推导功能安全要求(Functional Safety Requirements, FSR),明确系统在故障情况下应采取的安全机制。最后,功能安全概念需经过认可评审与验证评审,形成验证报告,确保其符合安全目标且能有效减轻或避免危害。整个流程中,每个环节的输出都需经过严格的文档管控与评审,以保证开发过程的可追溯性与合规性。
二、相关项定义与功能定义的边界与关联
相关项定义(Item Definition)是概念阶段的起点,其核心是明确“相关项”的范围与边界。根据ISO 26262标准,相关项是指在整车层面实现完整或部分功能的系统或系统组合,例如自适应巡航控制(ACC)、电子稳定程序(ESC)、转向助力系统等。这些系统直接影响车辆的动态行为,其功能异常可能导致危害事件的发生。与之相对的“要素”(如传感器、芯片、执行器)则是支持相关项功能的组件,其本身并不直接实现整车功能,因此需以“独立于环境的安全要素”形式进行开发,无需纳入相关项定义的范畴。
相关项定义与功能定义的区别在于,功能定义聚焦于单一功能的具体表现(如转向助力的扭矩范围、制动系统的减速度),而相关项定义则从整车视角出发,整合功能与系统间的依赖关系。例如,转向助力功能的定义可能描述“在车速30km/h时提供5N·m的助力扭矩”,而相关项定义则需说明“转向助力系统与驾驶员操作、路面摩擦力、ESP系统的交互关系”。这种整合性的描述是后续危害分析的基础,确保风险评估不遗漏任何系统间的关联影响。
相关项定义文档的编制需整合多方面信息,包括但不限于:法规与标准要求(如GB 7258、ISO 26262)、功能用例(Use Case)、预实验结果、产品设计文档等。文档内容需明确以下关键信息:相关项的功能目标(如“实现0-130km/h范围内的自适应巡航”);与驾驶员的交互方式(如“通过方向盘按键激活,仪表显示当前状态”);运行环境限制(如“仅在铺装路面、能见度≥50m时可用”);与其他相关项的依赖关系(如“依赖ESP系统提供的车身稳定信号”);已知的不安全信息(如“低温环境下传感器可能延迟响应”)。这些信息需经过跨部门评审(如产品、安全、测试团队),确保全面性与准确性。
三、 危害分析与风险评估(HARA)的实施流程
危害分析与风险评估(HARA)是概念阶段的核心活动,其目的是识别功能异常可能引发的危害事件,评估风险等级,并确定对应的安全目标。HARA的实施需遵循系统化的流程,确保覆盖所有潜在风险。
(一)功能异常与危害的识别
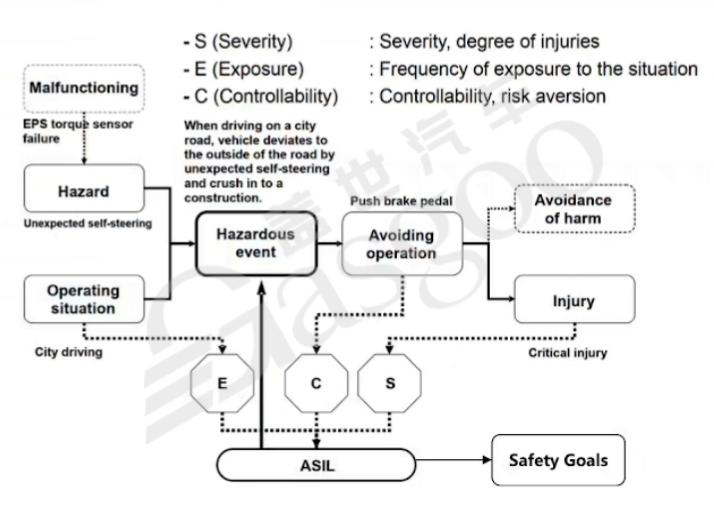
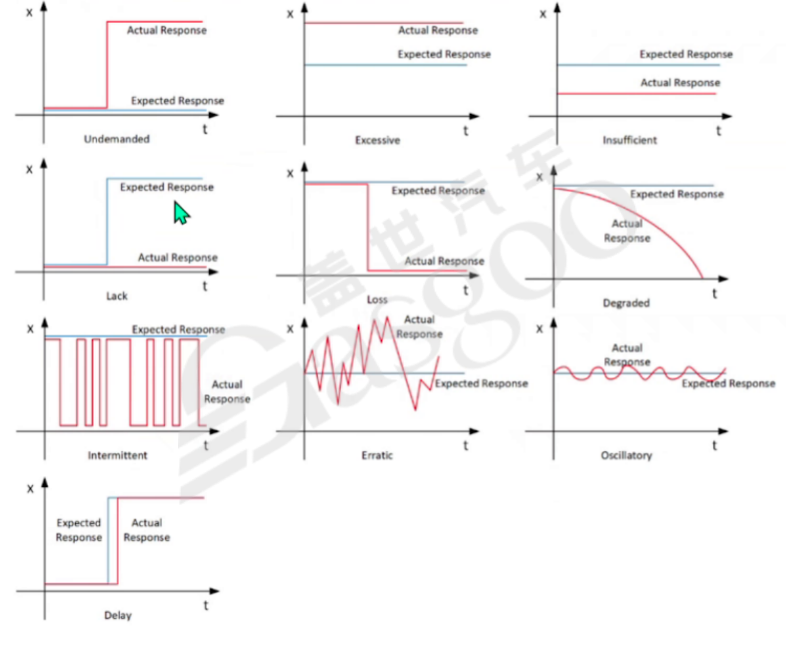
功能异常(Malfunctioning Behavior)是指相关项偏离预期功能的表现,可通过HAZOP(危险与可操作性分析)方法识别。HAZOP方法基于“引导词+功能参数”的组合,系统性地列举潜在异常,例如针对转向助力功能,引导词“过量”与参数“扭矩”组合可得出“转向助力扭矩过量”,引导词“丢失”与参数“信号”组合可得出“转向角信号丢失”。常见的引导词包括:过量(Excessive)、不足(Insufficient)、丢失(Loss)、反向(Opposite)、非预期激活(Undemanded Activation)、卡滞(Stuck)等。不同功能的异常模式存在差异,例如制动系统的异常可能包括“制动压力不足”“非预期制动”,而转向系统则可能包括“转向角度偏移”“助力突然消失”。
危害(Hazard)是功能异常在整车层面引发的不安全状态,需结合车辆运动的六个自由度(纵向、横向、垂直、俯仰、侧倾、偏航)分类。例如,纵向方向的危害可能包括“非预期加速”“制动失效”;横向方向的危害可能包括“非预期转向”“侧滑”。危害的描述需聚焦于整车级后果,而非功能本身的异常,例如“转向助力过量”是功能异常,而“车辆非预期偏离车道”才是危害。
(二)危害事件的构建
危害事件(Hazardous Event)是“危害+运行场景”的组合,其中运行场景(Operating Situation)需涵盖环境、道路、交通参与者等要素。运行场景的分类可参考VDA 702(场景目录)、SAE J2980等标准,典型维度包括:位置(如城市道路、高速公路、停车场);道路条件(如干燥、湿滑、结冰);交通状况(如拥堵、畅通、交叉路口);车辆状态(如静止、加速、转弯);环境因素(如光照、能见度、风速)。例如,“城市道路交叉路口处,车辆因制动失效导致追尾前方车辆”即为一个完整的危害事件,其中“制动失效”是危害,“城市道路交叉路口”是运行场景。
在构建危害事件时,需注意场景的“颗粒度”。过于宽泛的场景(如“道路行驶”)会导致风险评估不准确,而过于细化的场景(如“晴天30℃、风速2m/s的城市主干道”)则会增加分析复杂度。企业需根据产品特性定义合适的颗粒度,例如针对自动泊车功能,需重点关注“狭小空间(≤2.5m宽车位)”“障碍物密集区域”等场景。
(三)风险等级的评估
风险等级由暴露度(E)、危害度(S)、可控度(C)三个维度决定,每个维度分为4个等级,最终映射为ASIL等级(A、B、C、D)或QM(质量管理)。
暴露度(E)衡量危害事件所在场景的发生频率或持续时间,分为E1(极低)至E4(极高)。若危害与场景发生次数相关(如通过交叉路口的次数),则采用频率维度:E1(每年<1次)、E2(每年几次)、E3(每月几次)、E4(每次驾驶)。若与场景持续时间相关(如高速公路行驶时长),则采用时间占比维度:E1(<1%)、E2(1%-10%)、E3(10%-30%)、E4(>30%)。例如,“高速公路巡航”场景的暴露度通常为E3(中等),而“停车场泊车”场景可能为E2(低)。
危害度(S)评估伤害的严重程度,参考AIS(损伤严重度评分)分为S0(无伤害)至S3(致命伤害)。S0对应AIS 0(无伤害,如轻微刮擦);S1对应AIS 1-2(轻伤至中度伤害,如皮肤挫伤、单纯性骨折);S2对应AIS 3-4(严重但非致命伤害,如颅骨骨折、内脏损伤);S3对应AIS 5-6(致命伤害,如脊柱断裂、体腔开放伤)。实际评估中,可结合碰撞速度判断:例如正面碰撞中,Δv(相对速度)<10kph通常为S0;10-40kph为S1-S2;>40kph为S3。不同碰撞类型(正面、侧面、追尾)的阈值存在差异,侧面碰撞因车身保护较弱,Δv>20kph即可评为S3。
可控度(C)评估交通参与者规避伤害的能力,分为C0(可控)至C3(不可控)。C0指“超过99%的普通驾驶员可规避伤害”(如低速下的轻微转向偏移);C1指“90%-99%的驾驶员可规避”(如高速公路上的车道偏离,驾驶员有足够时间修正);C2指“不足90%的驾驶员可规避”(如突发制动失效,需紧急操作);C3指“几乎无法规避”(如高速行驶中转向突然失灵)。C2需通过测试验证:选取20名不同驾驶经验的测试者,在场景复现中若均能规避伤害,可证明85%以上的可控性;C1可基于专家判断;C3无需验证。
(四)安全目标的确定
安全目标(Safety Goal)是针对每个危害事件制定的风险控制目标,其ASIL等级由E、S、C的组合确定。根据ISO 26262标准,E、S、C的不同组合对应不同ASIL等级,例如:S3(致命伤害)+E4(高暴露)+C3(不可控)=ASIL D;S2(严重伤害)+E3(中暴露)+C2(低可控)=ASIL B。安全目标需以“防止/减轻危害事件”的形式表述,例如“防止因制动失效导致的高速行驶中追尾事故(ASIL D)”。
安全目标需明确两个关键属性:安全状态(Safe State)和FTTI(故障容错时间间隔)。安全状态是指故障发生后应达到的安全状态,例如“制动系统失效后,激活电子驻车制动,保持车辆静止”;FTTI是从功能异常到危害事件发生的最大允许时间,需通过仿真或测试确定,例如转向系统的FTTI通常为200ms(即故障发生后,需在200ms内完成诊断与安全状态迁移)。FTTI的确定需考虑最坏场景:例如在湿滑路面上,转向失效后车辆可能在1.5s内偏离车道,因此FTTI需≤1.5s。
四、功能安全概念(FSC)的设计与验证
功能安全概念(FSC)是基于安全目标推导的整车级安全方案,核心是将安全目标转化为可执行的功能安全要求(FSR),并分配至系统或组件层面。
(一)功能安全要求(FSR)的推导
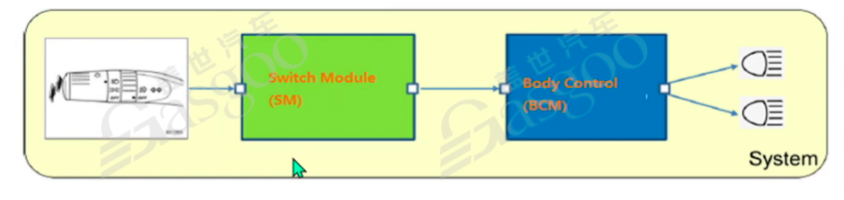
FSR的推导需覆盖故障处理的全流程,包括故障避免、探测、响应及安全状态迁移。以“防止近光灯非预期关闭(ASIL B)”的安全目标为例,FSR可分为:
输入层:开关模块(SM)需持续发送“点亮”信号(FSR1:SM在驾驶员激活后,每秒发送一次“近光灯开启”信号,信号错误率≤10⁻⁸/h);
传输层:CAN总线需检测信号异常(FSR2:通讯链路需采用CRC校验,错误帧比例≤10⁻⁶);
处理层:车身控制模块(BCM)需验证信号有效性(FSR3:BCM若连续3次未收到信号,需激活备用电源点亮近光灯);
输出层:灯具执行器需确保冗余(FSR4:至少保持一盏近光灯点亮,即使其中一个灯泡故障)。
FSR需明确以下属性:运行模式(如“仅在点火开关ON时生效”);容错时间(如“BCM需在100ms内检测到信号丢失”);安全状态(如“近光灯保持常亮”);冗余设计(如“双路电源供电,单路故障时自动切换”)。对于辅助驾驶等复杂系统,还需考虑紧急运行策略:例如“当辅助驾驶系统失效时,在5s内提醒驾驶员接管,若未响应则执行靠边停车”。
(二)外部依赖与接口设计
功能安全概念可能依赖非电子电气技术(如机械、液压系统)或外部相关项(如ESC、ADAS系统),需明确这些依赖的安全要求。例如,若制动系统的安全概念依赖机械驻车制动(非电子系统),则需导出:“机械驻车制动在车速≤5km/h时,制动效能≥300N·m(ASIL QM)”。对于外部电子系统,如“辅助驾驶系统依赖ESC提供的横摆角速度信号”,则需提出:“ESC发送的横摆角速度信号误差≤2°/s,更新频率≥100Hz(ASIL C)”,并要求ESC遵循ISO 26262的对应等级开发流程。
接口设计需定义信号格式、校验机制及容错策略。例如,CAN通讯接口需规定:“信号采用8位数据格式,包含1位奇偶校验位;连续3次校验失败时,触发备用通讯链路(如LIN总线)”。对于跨系统接口,还需考虑时序要求:“ADAS系统向制动系统发送的减速请求,需在10ms内得到响应,超时则触发降级”。
(三)功能安全概念的验证
功能安全概念的验证需证明其符合安全目标,包括以下方式:
评审验证:由独立团队(I2等级)审核FSR的完整性(是否覆盖所有安全目标)、一致性(不同FSR之间无冲突)及可行性(技术上可实现);
仿真验证:通过CarSim、Prescan等工具仿真故障场景,验证安全机制的有效性,例如“仿真转向助力丢失后,ESP系统是否能在FTTI内纠正车辆轨迹”;
原型验证:在HIL(硬件在环)测试台架上,模拟ECU故障(如信号中断、计算错误),验证安全状态迁移的及时性,例如“人为切断转向传感器信号,测量BCM激活备用模式的响应时间是否≤150ms”。
验证需形成文档,包括验证计划(明确验证目标与方法)、测试用例(覆盖所有FSR)、结果报告(记录实测值与目标值的偏差)。对于高ASIL等级(如C、D)的安全目标,验证需采用更严格的方法,例如增加测试样本量(≥50次)、引入第三方机构审核。
汽车功能安全概念阶段是安全开发的基石,其核心是通过相关项定义明确边界,通过HARA识别风险,通过FSC设计安全方案。相关项定义需聚焦整车功能与交互,确保分析范围的准确性;HARA需系统化识别危害事件,科学评估E、S、C以确定ASIL等级;FSC需将安全目标转化为可执行的FSR,覆盖故障处理全流程,并验证其有效性。
概念阶段的输出直接影响后续开发环节,因此需注重文档的规范性与评审的独立性。企业需建立跨部门协作机制(如安全委员会),确保产品、安全、工程团队的协同;同时,需积累场景库与故障案例(如基于实际事故数据),提升HARA的准确性。随着辅助驾驶等复杂功能的普及,概念阶段还需结合预期功能安全(SOTIF,ISO 21448),考虑性能局限导致的风险,实现更全面的安全保障。
本文地址:https://auto.gasgoo.com/news/202507/12I70428907C106.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921