盖世汽车讯 软体机器人是机器人领域的一个新兴领域,在非结构化环境中具有良好的适应性。传统机器人在不可预测的地形中举步维艰,而软体机器人则凭借其极高的灵活性,在导航技能方面不断进步。
据外媒报道,日本先进科学技术研究所(JAIST)研究人员开发的软体机器人Leafbot就是这样一种变革性设计。在Van Anh Ho教授的带领下,JAIST的博士生Linh Viet Nguyen和Khoi Thanh Nguyen也参与其中,研究团队探索了Leafbot在各种不平坦表面和地形上的适应性。相关研究成果发表在期刊《IEEE Transactions on Robotics》上。
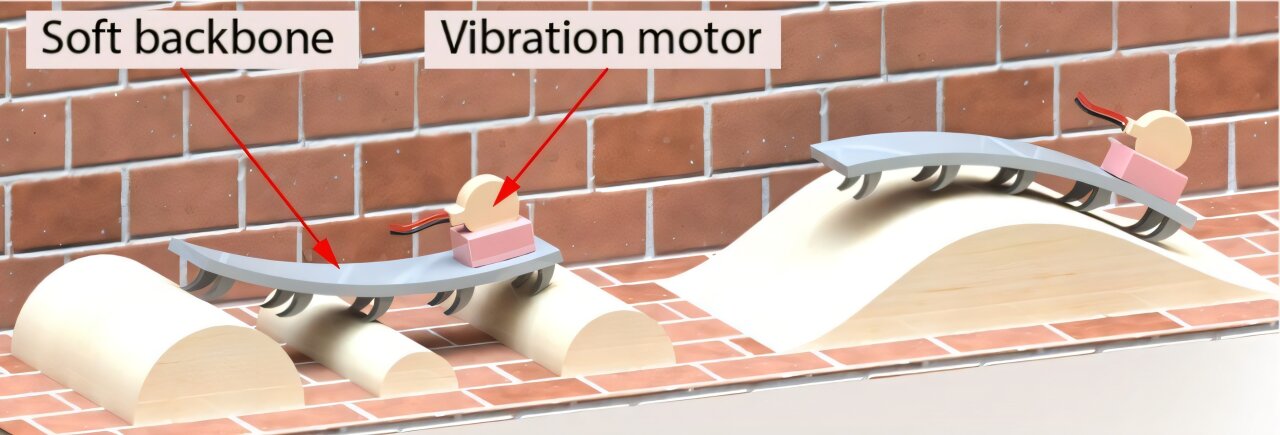
图片来源:期刊《IEEE Transactions on Robotics》
“软体机器人因其在复杂和非结构化环境中导航的能力而受到越来越多的认可,这使得它们在检查和探索等应用中很有价值。通过利用振动驱动的运动,我们设计了一种能够以最少的控制机制克服这种复杂障碍的机器人,”Ho教授说。
传统的基于振动的机器人通常需要复杂的控制算法来处理不规则的地形。相比之下,Leafbot使用其柔性软材料结构和简单而有效的运动策略来穿越斜坡和穿越障碍物。
该团队设计了Leafbot的结构,使用柔软的单片硅橡胶,底部有弯曲的突起,以复制爬行的肢体。然后将软体机器人的主体连接到振动马达上,以实现运动的振动机制。
为了解释Leafbot运动背后的物理原理,研究团队开发了一个分析模型,该模型结合了向心力、不对称摩擦相互作用和肢体变形等因素。使用互补的有限元分析模拟,他们进一步完善了对软体结构如何与不同地形相互作用的理解。
“我们的目的是分析形态如何影响运动。实验结果验证了我们的预测,描绘了特定的肢体模式如何优化Leafbot在具有挑战性的地形上的表现,”Ho教授补充道。
除了计算建模外,研究人员还进行了广泛的实证测试。研究人员比较了三种具有不同肢体配置的机器人模型在不同地形上的表现,包括斜坡、半圆形障碍物和阶梯场地形。
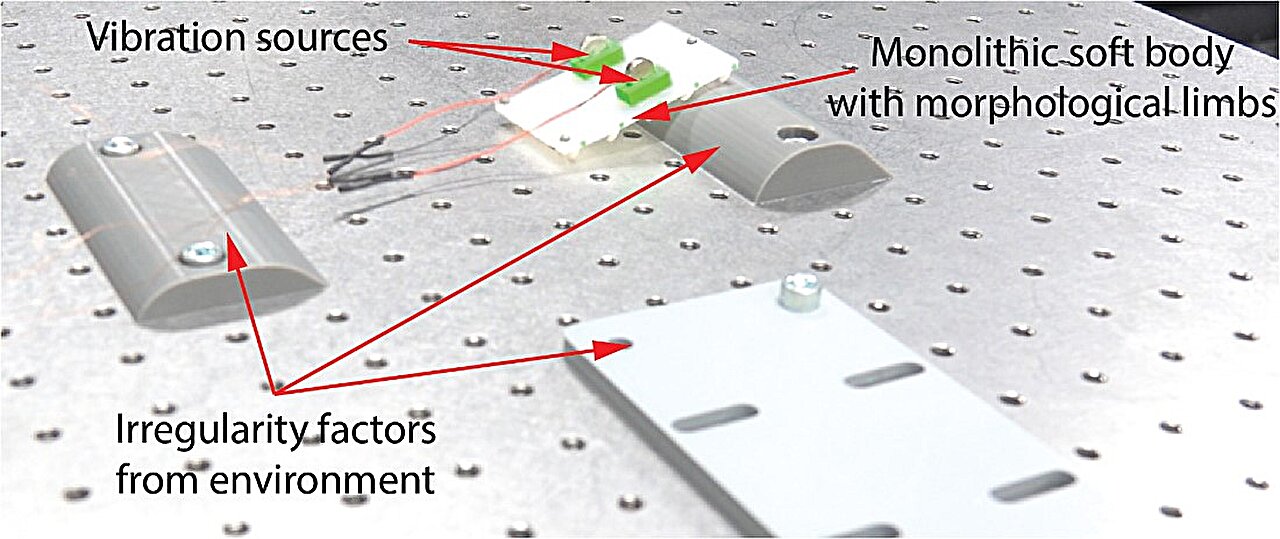
图片来源:期刊《IEEE Transactions on Robotics》
研究人员发现,机器人弯曲的肢体形态在克服障碍方面发挥了关键作用,使其能够穿越高达30度的斜坡以及半圆形障碍物。此外,理论建模和实验验证的成功结合确保了Leafbot的设计既有效又可扩展。
“与依赖精确驱动的刚性机器人不同,Leafbot的适应性使其能够在不同表面上进行自我调整。这种能力使其特别适用于需要在狭窄和不平坦空间中移动的应用,”合著者Linh Viet Nguyen指出。
这项创新机器人研究的意义不仅限于实验室实验,而是远远超出了实验室实验的范围,使跨不同领域的实际应用成为可能。Leafbot的适应性对于受灾地区(或有落石和不平坦的地面)的任务尤其有希望。
由于这些机器人能够在狭窄空间内导航,因此它们还可用于检查管道、地下勘探和其他需要自主移动的工业环境。此外,这些动态机器人还可以应用于农业,用于土壤分析和作物检查等活动,从而实现精准农业,而不会破坏脆弱的农场地形。
合著者、JAIST的博士生Khoi Thanh Nguyen表示:“我们相信,从我们的研究中获得的见解,加上人工智能和机器学习的进步,最终可以实现以最少的人为干预完成任务。通过整合感官反馈系统并提高其能源效率,我们设想Leafbot将发展成为一个能够实时适应地形和决策的自主系统,从而改变软体机器人领域。”

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202502/19I70418938C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921