盖世汽车讯 为了确保自动驾驶汽车(AV)安全行驶,需要依赖能够精确反映周围环境变化的最新高清地图。如果此类地图未得到持续更新,则会很快过时,从而增加交通事故的风险,还可能阻碍完全自动驾驶汽车的发展。
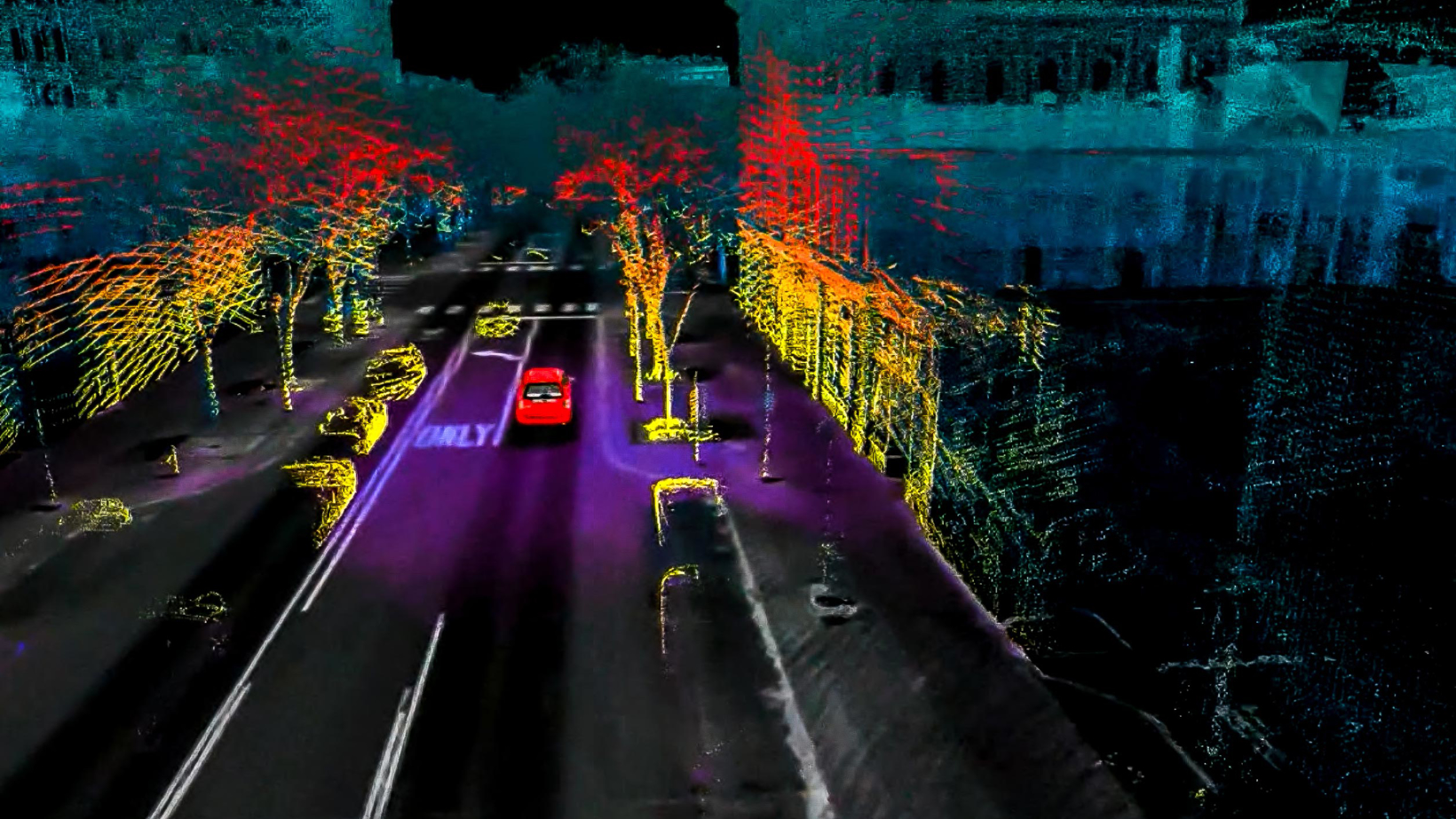
在3D地图上定位的自动驾驶汽车(图片来源:福特汽车公司)
据外媒报道,美国得克萨斯农工大学(Texas A&M)工程技术与工业分销系(ETID)副教授Gaurav Pandey博士获得了福特汽车公司(Ford Motor Company)的研究资助,研发新软件框架让地图实时更新,以突破现有技术的局限。
在ETID多学科工程技术(Multidisciplinary Engineering Technology)项目的计算机视觉与机器人实验室(Computer Vision and Robotics Lab),Pandey博士正在专注于以最优方式构建最佳地图,以在日常生活中实现高度自动化和完全自动化的交通。
有些人认为,自动驾驶汽车可以仅依赖摄像头即可从A点安全行驶至B点,如同人类依靠视觉进行驾驶一样。然而,Pandey博士指出,人类在驾驶过程中在利用视觉的同时还会结合大脑中构建的认知地图。当条件发生变化时(如在施工中),此类认知地图会自动更新。相比之下,现在自动驾驶汽车的地图技术非常昂贵,而且没有简便的方法实现实时更新。
为了推动该技术发展,Pandey博士正在研发一个软件框架,旨在利用摄像头数据生成众包3D地图,并实现视觉定位。众包数据将来自于福特已上路车辆中的摄像头和传感器,利用自动收集的数据,而不是依赖专门的地图测绘车辆四处行驶来收集数据。
Pandey博士将采用此类众包数据来生成新的地图测绘能力,以实现地图的实时更新,并提供低成本的视觉定位。该技术的目的在于改进自动驾驶,最终让完全自动驾驶车辆可以上路。
Pandey博士拥有超过10年的自动驾驶汽车研究经验,致力于将自动驾驶汽车融入日常生活中。他指出,目前自动驾驶汽车已经在受控环境中得到广泛应用,例如在采矿业、港口以及自动驾驶出租车服务中。Pandey博士认为,自动驾驶汽车全面普及已不是“是否”的问题,而是何时能够大规模实现的问题。

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202501/26I70417348C601.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921