

盖世汽车讯 据外媒报道,日本东京工业大学(Tokyo Institute of Technology)工程学院Kei Sakaguchi教授与美国弗吉尼亚理工大学(Virginia Tech)Walid Saad教授领导的研究小组合作实现了“智慧移动出行数字孪生”(Smart Mobility Digital Twin)技术,可以实时在网络空间中重现物理空间中的交通状况。
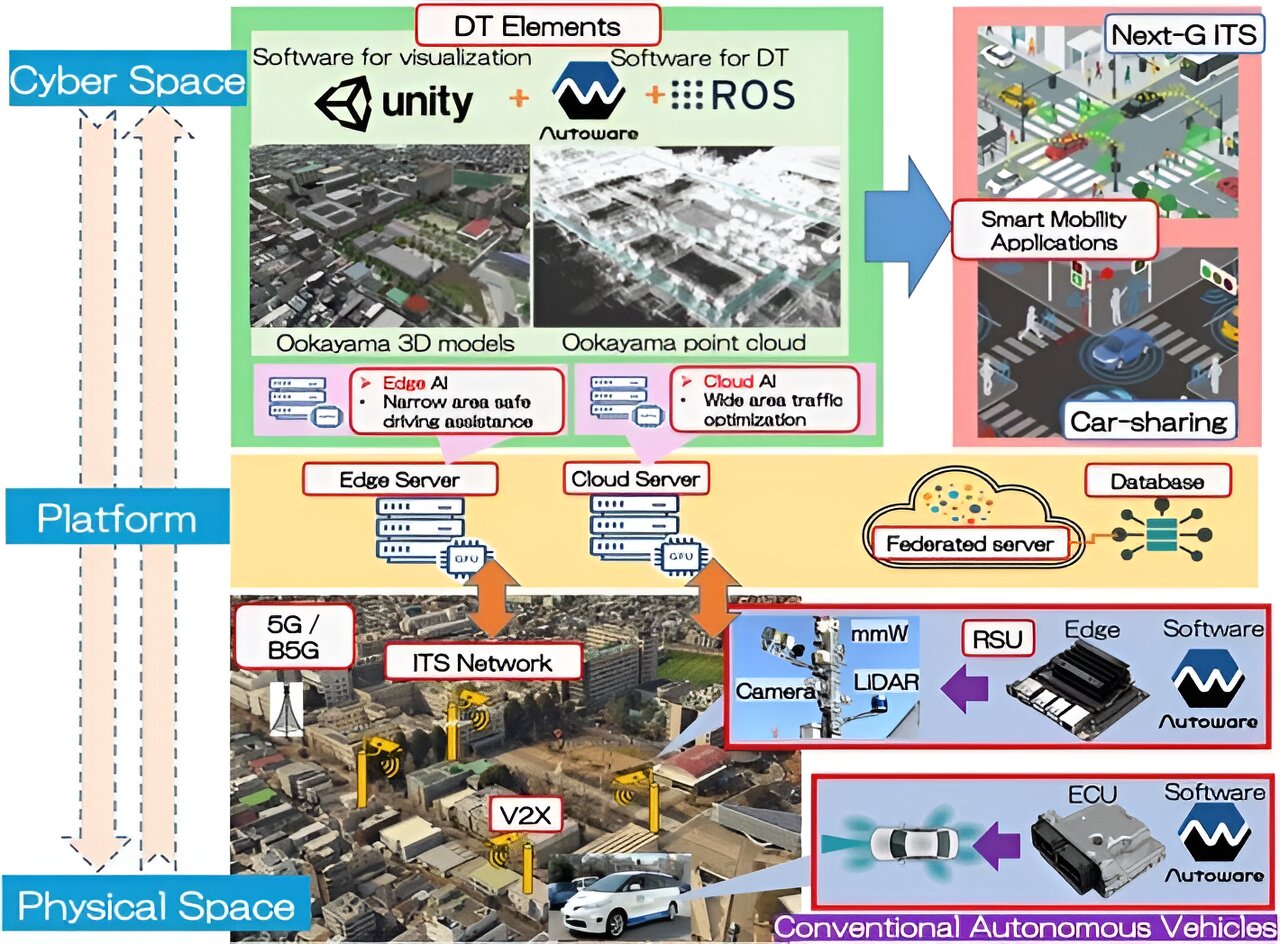
智慧移动出行数字孪生(图片来源:日本东京工业大学)
虽然数字孪生技术(可以在网络空间复制实体物体和系统)在制造业和建筑业等领域得到了迅速发展,但是直至现在,该技术才被应用于动态移动出行领域。
在该项研究中,研究人员采用了东京工业大学冈山校区(Ookayama Campus)的智能移动出行教育&研究试验场(Smart Mobility Education & Research Field)打造了一款智能移动出行数字孪生,并利用该款数字孪生研发了结合自动驾驶和远程控制功能的混合自动驾驶演示系统。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202409/25I70406109C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














