盖世汽车讯 具备在光线不利的环境中(例如在夜间、阴影位置或雾天条件下)检测物体的能力,可以大大提高自动驾驶汽车和移动机器人系统的可靠性。然而,目前大多数广泛使用的计算机视觉方法在光线不足的情况下表现不佳。
据外媒报道,香港理工大学(Hong Kong Polytechnic University)的研究人员最近开发出新的仿生视觉传感器,可以适应其捕捉的环境的光谱特征,从而成功地在更大范围的照明条件下检测物体。研究人员在发表于期刊《自然电子》(Nature Electronics)的论文中详细介绍了这一基于背靠背排列的光电二极管阵列的传感器。
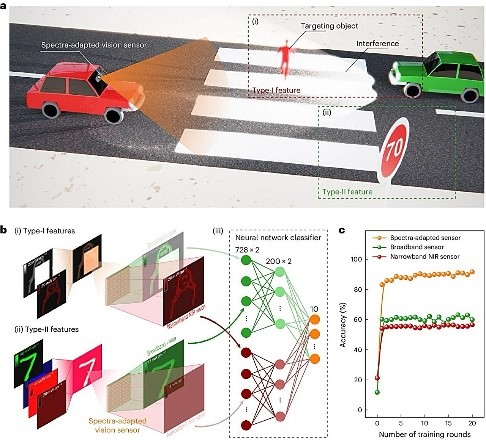
图片来源:《Nature Electronics》
该论文的共同作者欧阳帮森表示:“在《自然电子》上的一篇论文中,我们开发出一种简单的传感器内光强适应方法来提高机器视觉系统的识别精度。基于过去的研究工作,我们将这一策略从光的强度维度扩展到光谱维度。”
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202408/6I70401061C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921