盖世汽车讯 现在大多数机器人系统要么可以高精度地处理特定任务,要么低精度地完成一系列简单任务,但往往缺乏在不影响精度的情况下解决多项任务的能力。为了实现大规模部署,多用途机器人需要具有在特定位置精确地定位、拾取和放置物体的能力。
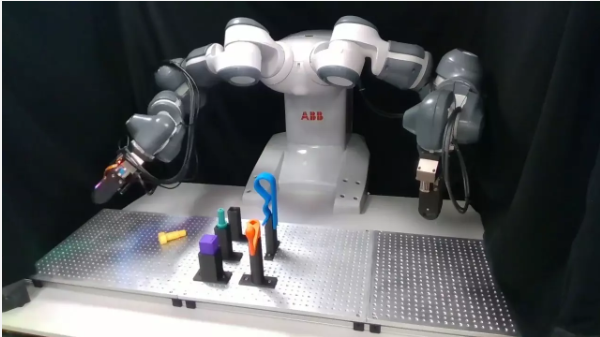
(图片来源:麻省理工学院)
据外媒报道,麻省理工学院(MIT)的研究人员最近推出了SimPLE(拾起定位和放置仿真)。这是一种基于学习的新型视觉触觉方法,可以帮助机器人系统拾取和放置各种物体。这种方法通过用模拟来学习如何拾取、重新抓住和放置不同的物体,只需对这些物体进行计算机辅助设计。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202407/27I70400206C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921