

盖世汽车讯 类人机器人,即身体结构类似人体的机器人或虚拟系统,在现实世界中具有广泛的应用。它们的四肢和身体与人类相似,因此可以模拟各种人类动作,如行走、蹲伏、跳跃和游泳等。
(图片来源:arxiv.org)
通过计算生成虚拟类人形角色的真实动作,可能对开发电子游戏、动画电影、虚拟现实(VR)体验和其他媒体内容发产生有趣的影响。然而,电子游戏和动画中所描绘的环境往往是高度动态和复杂的,因此在这些环境中引入类人机器人的规划动作更具挑战性。
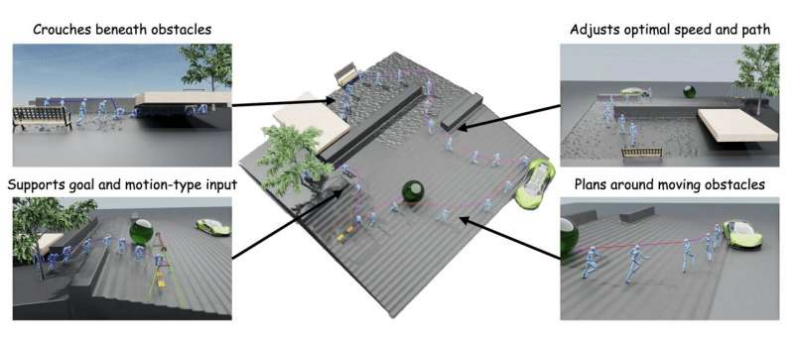
据外媒报道,以色列NVIDIA研究中心(NVIDIA Research)的研究人员最近推出新计算方法PlaMo(规划和移动,Plan and Move),可用于规划人形机器人在复杂的3D物理模拟世界中的移动方式。在arXiv预印本服务器上发表的一篇论文中介绍了这种方法,该方法由场景感知路径规划器和稳健的控制策略组成。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202407/13I70398823C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














