盖世汽车讯 当驾驶员看到前方有骑行者或者交通灯变红时,本能的就会减速。他们的反应依赖于通过视觉和声音获取的信息以及对道路状况、人类行为以及交通规则知识的无缝融合。
自动驾驶汽车试图通过“智能传感”来模仿人类的该项技能。计算机会处理摄像头和雷达等传感器的数据,让车辆可以决定方向与速度。但是在可靠性、计算效率和实时决策方面,自动驾驶汽车想要与人类匹敌,还有很长的一段路要走。
据外媒报道,中国安徽省合肥市中国科学技术大学(USTC)的计算机科学家张燕咏教授希望可以在道路感知方面缩小自动驾驶汽车与人类的差距。
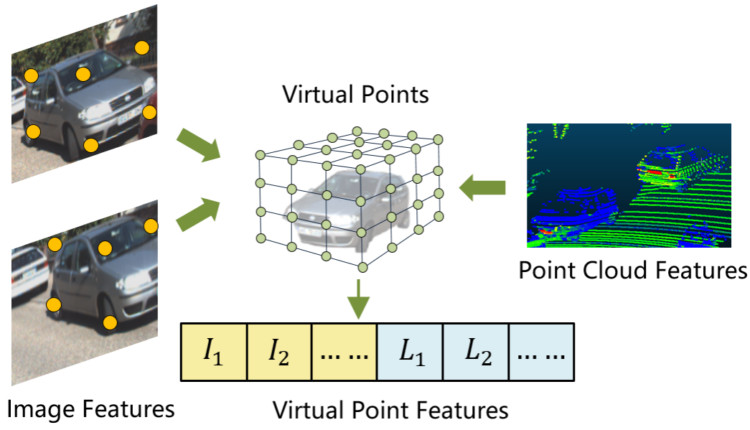
图片特征,虚拟点特征,点云特征结合(图片来源:中国科学技术大学)
张教授表示:“我们团队的工作内容涵盖了按钮大小的感知设备以及从大量数据中学习到的复杂感知算法。”
为了提高自动驾驶汽车的道路感知能力,张教授团队在融合摄像头、激光雷达和毫米波雷达的数据方面取得了很大的进步,可以让无人驾驶系统因可以更好地探测和跟踪行人或移动的车辆等3D物体,从而变得更加安全。
数据融合
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202405/8I70391322C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921