盖世汽车讯 据外媒报道,加拿大多伦多大学(University of Toronto)的一组工程研究人员正专注于提升自动驾驶汽车等机器人系统的推理能力,以增强此类系统在不断变化的环境中的可靠性和安全运行能力。
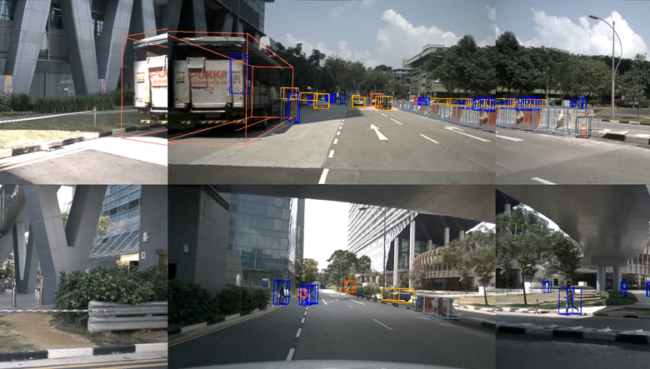
自动驾驶推理能力(图片来源:多伦多大学)
多目标物体跟踪是自动驾驶汽车领域中一个至关重要的问题,也是Steven Waslander教授领导的多伦多大学机器人与AI实验室(UTIAS)的研究重点。机器人系统追踪移动物体(包含其他车辆、行人和骑行者等)的位置和运动,从而在人口密集的地区规划行进路径。
追踪信息主要从计算机视觉传感器(2D摄像头图像和3D激光雷达扫描)中收集,并在每个时间戳处以每秒10次的频率进行过滤,以预测移动物体的未来运动。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202405/30I70394073C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921