
盖世汽车讯 开发能够自动驾驶的汽车一直是机器人研究和汽车行业追求的目标。虽然多家公司一直在投资和测试这些汽车,但迄今为止,各家公司只能在有限的环境中部署这些汽车。近年来,研究人员一直在探索所谓的“自主代客泊车(AVP)” 的可能性,这种功能可使汽车从停车场入口自动行驶到免费停车位。尽管该自动驾驶应用吸引了研究人员的兴趣,但迄今为止,其可靠实现仍具有挑战性。
据外媒报道,上海Mach Drive的研究人员开发出开放空间无碰撞轨迹规划器(Openspace Collision-freE trAjectory plaNner,OCEAN),可用于车辆的自主泊车。研究人员已将论文预稿上传至arXiv,其中详细介绍了该规划器可以显著提高汽车安全到达停车位的能力,而不会在途中与物体相撞。
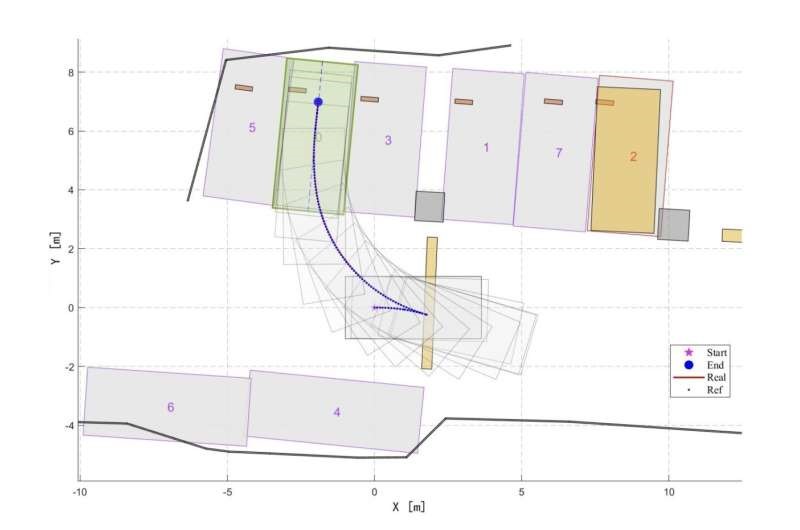
图片来源:arXiv
论文主要作者Dongxu Wang、Yanbin Lu及合作者在论文中写道:“OCEAN是基于优化的轨迹规划器,通过交替方向乘子法(ADMM)加速,具有更高的计算效率和鲁棒性,适用于所有动态障碍物较少的场景。”
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202404/2I70387657C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921













