盖世汽车讯 脉冲激光扫描是自动驾驶和机器人移动出行的核心技术,此种技术的原理即定向光脉冲被反射物体向后散射,并利用脉冲发射和探测到脉冲之间间隔的时间来计算深度。此类返回激光脉冲的直接飞行时间(d-ToF)测量结果使得复杂场景的三维成像成为可能。
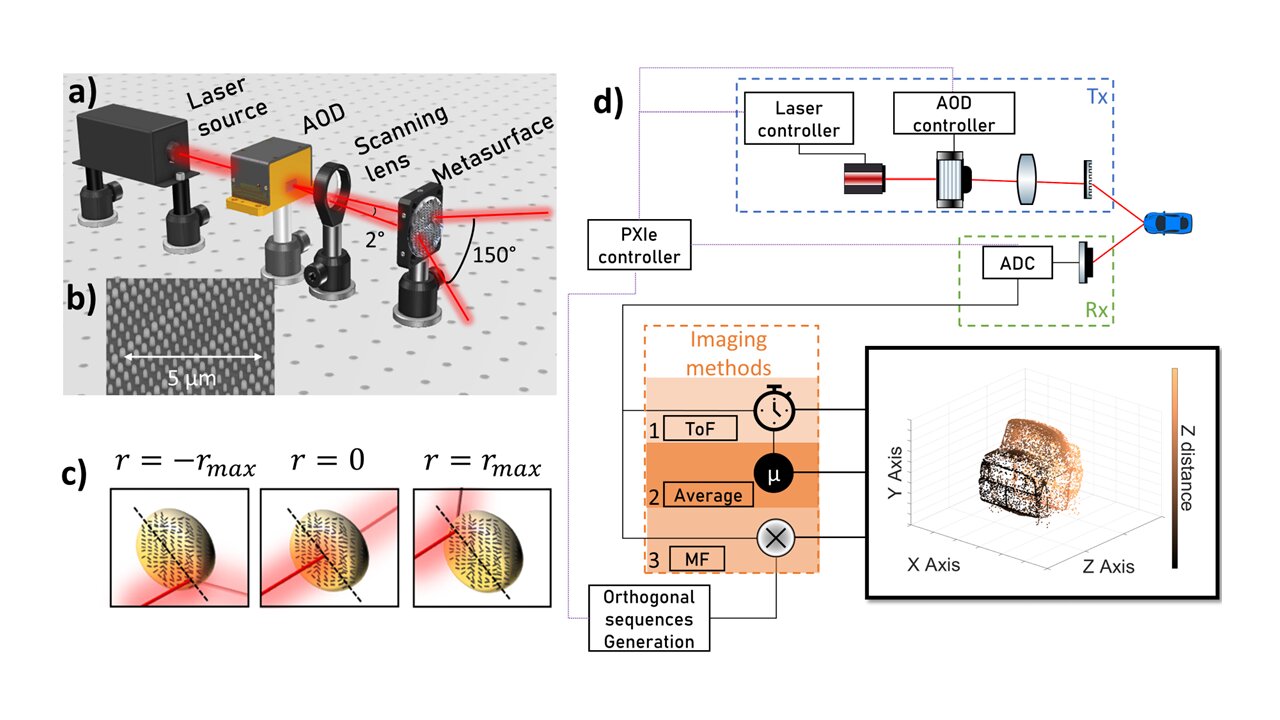
超快高视场超表面激光雷达的架构(图片来源:蔚蓝海岸大学)
目前,激光雷达技术还需要得到大量的发展,包括提升高角度分辨率的观测视场(FoV),改进成像帧率,通过降低信噪比(SNR)扩大模糊范围,降低制造成本和组件尺寸,从而让其在全球市场上实现大规模工业化应用。
法国蔚蓝海岸大学(Université Côte d'Azur)Patrice Genevet研究小组提出了一个创新解决方案,以解决激光雷达技术的一些限制,并满足汽车激光雷达的苛刻要求。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202307/23I70351738C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921