2023年5月9日—10日由捷途汽车主办,盖世汽车承办的2023捷途汽车电子架构与智能驾驶论坛上,地平线智能驾驶产品市场总监张晓晨表示,智能计算正逐步取代逻辑计算,成为车载计算的核心。当前随着DCU持续演进,算力得到增强,规控走向逻辑计算与深度学习计算协同;智能HMI使驾驶行为更安全、体验更流畅;向域控制器架构演进。
基于强大的算法,地平线征程5高效支持BEV、Transformer等领先自动驾驶算法部署,对动静态BEV感知、道路要素关联关系、目标轨迹预测进行有效规划,并对复杂拓扑的无保护左转、拥堵博弈匝道汇出、无保护右转路径和时机选择以及停车下客规划避让的场景进行应对,以带来极致用户驾乘体验。

张晓晨 | 地平线智能驾驶产品市场总监
以下为演讲内容整理:
自动驾驶传统架构的改变
自动驾驶汽车是人类工业史上最有挑战的系统工程,需要解决复杂多变的动态自然场景,以及系统带来的大量不确定性和各种动态博弈。地平线以终为始,软硬结合的理念,持续驱动自动驾驶的演进。在此背景下,自动驾驶如何应对系统工程级的挑战成为重点,从最初的发展到深度学习,自动驾驶的等级在逐步的提高,并且智能安全的级别也在不断提升。可以看到随着等级的提升,势必对算力的需求也会增加,因此高阶智能驾驶的落地,会使大规模并行化计算成为趋势。
对软件来说,也在逐步由1.0基于规则向2.0数据驱动发展,并且越靠近感知的部分,基于数据的程度越高。在1.0向2.0数据驱动的范式演进过程中,智能计算逐步取代逻辑计算,成为车载计算的核心。在传统架构中,智能驾驶和座舱是一个相互分开的关系,规控主要由逻辑计算来完成。在智能驾驶中,规控走向逻辑计算与深度学习计算协同,具备低成本和能耗的特点。
对地平线来说,目前征程2和征程3已经能支撑到传统架构,包括在智能驾驶、座舱去实现智能化的功能,并且已经开始大量的落地及应用。汽车电子电气架构大多都在中央计算平台、智能中台的方式中演进,会使智能驾驶和智能座舱得到更好的融合,并且可以实现人、车、路的数据接入,达到一体化感知。在这个形态下的智能汽车中台,需要更大的算力支撑,才能实现智能化的功能,同时座舱功能也可以实现人机交互的功能,去增加人和机器之间的信任程度。
征程5的架构与算法
地平线的征程5以及未来的下一代芯片,会更好地支撑电子电气架构,也就是中央计算平台。地平线在今年初发布了一个端到端的系统架构,基于传感器的信息,可以学习人类的驾驶行为,输出全场景的智能驾驶功能。
这样一套架构,最大的特点是其能力会更像人类驾驶,目前在地平线的征程5中得以实现。其中的关键步骤一是动静态BEV感知,比如十字路口复杂的车道线,以及道路边缘等,可以实现更好的感知;二是道路要素关联关系,通过纯视觉的方式,可以摆脱对于高精度地图的依赖;三是目标轨迹预测,人类驾驶最厉害的点是通过车辆非常微小的动作,预判它下一步的轨迹,所以可以通过端到端的模型,去实现目标轨迹的预测。
基于这套算法,对城市智能驾驶中具有挑战性的场景都可以很好的应对,比如复杂的无保护的左转,意味着有大量动态车辆的博弈,以及复杂路口的静态要素,尤其是高架桥等路口,可以很好应对这一场景。还有在复杂拥堵的场景中,可以实现较好的匝道汇入与汇出。
强大算法对参数都是亿级的需求,在面临复杂智能驾驶的场景,以及对体验更高的要求,所需要参数的规模也会持续的增加。参数规模的暴涨,是对大算力以及高带宽的需求,地平线计算的架构会始终遵循这一需求。现在阶段征程5是128TOPS的芯片,计算能力可以达到1718FPS的计算性能,同时为了满足未来持续增长的模型以及参数的需求,还会不断提升算力的能力。
智能驾驶的“最强大脑”
地平线架构名为BPU,也被称为智能驾驶的“最强大脑”。对每一代BPU的架构来说,都需要解决算法的需求。第一代架构更多是解决辅助驾驶的功能,基于软硬件的结合进行优化。而第二代架构会随着自动驾驶向L2、L2+逐渐的演进,会有更多传感器接入的需求,以及时间和空间融合的需求,此时就需要支撑轨迹预测等功能和BEV的架构。
这样一套架构是我们针对异构模型,来提供更强的计算能力和多样性。这其中凝结了地平线最先进的多项核心技术,比如浮点向量加速单元,可以让开发者在更加细粒度的环境中进行开发和应用。虚拟化Virtualization,可以让开发应用更加透明,提升多任务并行处理的能力。
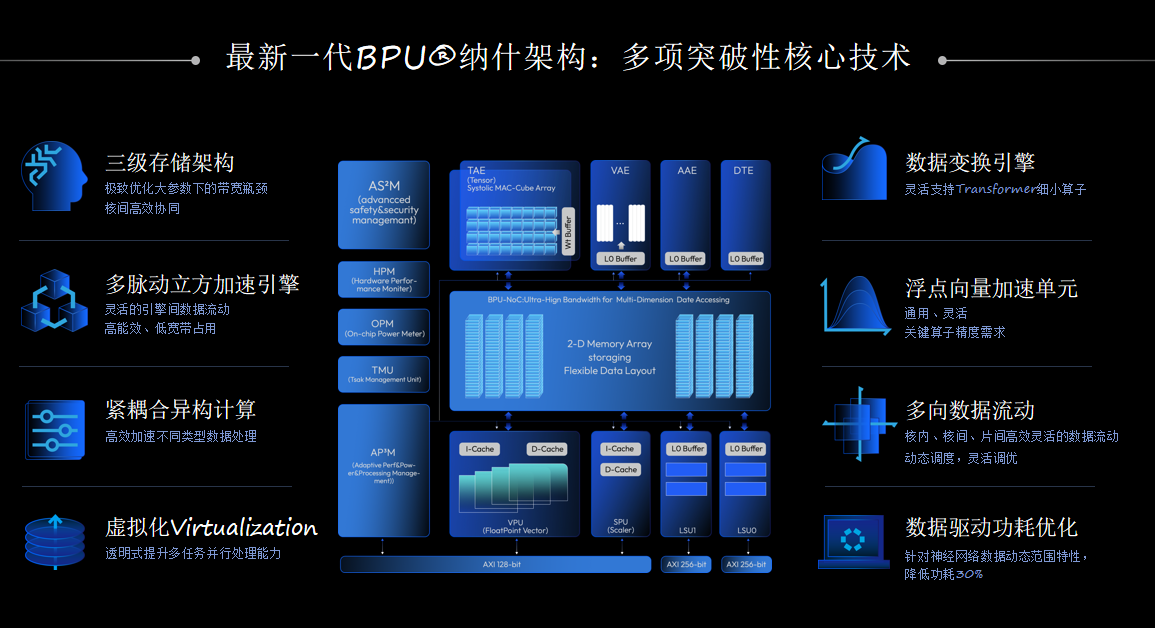
图源:演讲嘉宾材料
面向开发者,BPU的易用性成为关键优势之一。基于前两代BPU的基础和架构上,这一代已发展出新的编程范式。一方面可以提升计算的能力和速度,另一方面可以减少由CPU搬运到BPU过程中的损耗,进而提升运算的效率,所以对开发者来说,使用更便捷与高效。
在云端也建设了强大的基础设施,来支撑海量的数据和巨量模型,目前地平线在算力规模上,可以支撑接近21亿次每秒的计算能力,自动化标注已达到90%自动化率,每周可以实现5万次以上的自动标注,并且后续仿真测试的规模,也会持续提升万倍的量级。做这样大规模云端算力的基础设施,是为了提升开发的效率和进程,推动整个行业的发展。
自动驾驶未来的发展趋势
基于目前先进算法以及云端基础设施等能力,自动驾驶的算法会由现在分阶段的范式,逐步走向物理世界的统一。《思考快与慢》提到了一个概念,人脑有两个系统,其中一个系统是认知的慢性,在这个系统中构建一个世界模型,在这个模型下,可以分析整个系统的效率等。另外一个系统是人脑的本能系统,比如在遇到风险时,如何快速做出反应。相信未来的架构更多是双系统的融合,最终实现对物理世界统一的表达。
自动驾驶这个行业在过去经历了飞速的发展,从一体机到性价比的预控,实现行泊一体,再到L2、L2+实现高速的NOA,目前已经实现了全场景的自动驾驶,ODD的场景在持续扩展和增加。目前行业已发展到了MPI迭代周期,在这样一个周期下,基于软件和硬件能力的加持,可以持续去提升MPI的能力,更好的应对自动驾驶的场景和所带来的体验。
地平线始终致力于迭代发展,不断持续优化算法与开发平台,推进自动驾驶行业的关键指标MPI的平均水平,5年达到现在的1000倍。作为一家智能驾驶计算方案的提供商,我们始终秉承以人为本,体验至上的品牌理念,未来将继续实行共赢的合作理念,我认为技术的价值,不在于让机器强大,而是让人更伟大。
(以上内容来自于地平线智能驾驶产品市场总监张晓晨于2023年5月9-10日在捷途汽车主办,盖世汽车承办的2023捷途汽车电子架构与智能驾驶论坛上发表的《用户价值驱动的汽车电子电气架构演进》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202305/16I70341666C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921