智能化浪潮下,多功能集成提升了汽车的驾乘体验,但在制造成本、算力应用等多种问题上也需要解决,因此,基于同一控制单元完成行车与泊车两种功能的行泊一体域控应运而生,并迅速得到市场的青睐。
作为行业内少数已实现量产的域控产品,知行科技的iDC Mid域控采用TDA4VM芯片,搭配5V4R的传感器配置,依据ISO26262ASILB实施开发,不仅能够实现NOA导航辅助驾驶以及L2级的行车功能,还具备360全景环视、HPA记忆泊车功能。
2022年11月15日,由盖世汽车主办,上海虹桥国际中央商务区管委会、上海闵行区人民政府指导,上海南虹桥投资开发(集团)有限公司协办的2022第二届智能汽车域控制器创新峰会上,知行科技产品总监司正敏介绍,知行科技高阶行泊一体域控方案 iDCHigh也已投入研发,作为iDCMid的升级版,iDCHigh的算力规划达100+TOPS,可以实现自动驾驶功能的全场景覆盖。

司正敏 | 知行科技产品总监
以下为演讲内容整理:
知行科技核心产品方案
知行科技成立于2016年,我们始终秉承着品质第一,服务至上的发展理念,为“让人人拥有智能出行”的愿景而努力。我们专注于自动驾驶前装解决方案,致力于成为汽车制造商最信赖的智能驾驶合作伙伴。专注于自动驾驶产品解决方案的同时,我们也推出了多款高性价比的解决方案,与多家知名的主机厂达成了量产与项目开发合作,产品的定点车型已经接近30余款。
伴随着汽车新四化的快车,知行科技坚持以人为本产品理念,秉持用户体验思维,注重产品差异化的品类创新,关注产品与用户的长期关系。

图片来源:知行科技
为满足市场的快速发展需求,知行科技的产品线也在不停地迭代。且伴随着汽车电子电气架构从功能集成向高度集成的区域控制架构演进,我们规划于24年基于iDC平台实现全场景的智能驾驶。
iFC2.0是现在已经在多款客户车型上批量搭载的前视智能摄像头,主要满足的是目前L2的市场需求,架构设计支持MCU适配TC234及RH850,支持接入多路毫米波雷达,灵活满足客户不同需求。
为了实现在城市工况下的覆盖度, iFC3.0为此而生,采用800万像素高清广角模组,在目标的感知和识别上具有较强能力。
随着客户端智能化配置需求的快速增长,L2+在中高端车型中成为热门配置,高性价比行泊一体的域控也处于自带流量的状态,知行科技iDC Mid将完成多家客户的量产交付。

图片来源:知行科技
同时我们针对市场差异化的需求,在产品的设计定位上做了不同层次的差异化设计。比如针对核心的客户,我们提供定制化的开发,SuperVision是基于双EQ5H打造的一款产品。
基于前面的几款主打产品,可以看到知行科技在一步一步朝着全场景自动驾驶拓展。在iDC平台上,我们规划在2024年推出iDC High平台,完成全场景的拓展和应用,采用强视觉重感知的视觉解决方案,在系统架构和软件设计上将会继续秉承iDC平台高性价比的属性。这个产品将会在2024年交付,实现UrbanNOA及AVP的功能搭载。
跟随产业化趋势的发展,知行科技将持续探索自主可控的发展路线。
iDC平台核心能力

图片来源:知行科技
右下角是NOA在施工路况下的导航辅助驾驶功能,这款NOA功能覆盖的主要场景包括自动变道、自动上下匝道、施工区域通行等场景。
左上角是现在正在量产交付过程中的HPA记忆泊车功能。我们也在按照用户思维打磨更多细节,包括转弯的舒适性,代客泊车过程中的避障、绕障,还有安全性和效率、人机交互等。
右上角与左下角是我们做的APA自动泊车功能在大角度斜列式车位及水平车位的状态,自动泊车系统感知算法不仅采用了超声波与环视的融合,也采用Freespace可泊区域的感知算法,我们在视频当中可以看到它在泊入过程中进行泊车后端车位线的识别和处理,能够提高泊车效率和功能的灵活性,对于很多复杂场景也会有很大的帮助。
以上就是我们整体的iDC平台开发状态,那么是什么支撑了我们的产品快速开发?知行科技已经拥有全栈式自研的能力,在产品理念上专注以人为本、产品与用户关系、差异化、用户体验等要素。
全栈自研算法能力赋能iDC开发

图片来源:知行科技
算法的开发部署还得需要高效的架构设计支撑,主要介绍两大特点(操作系统及中间件),
首先是操作系统方面,IDC目前用到的操作系统有3个,MainDomain有Linux和RTOS,Linux主要用于应用功能及算法的开发,RTOS主要采用TI IP进行USS Driver、Video Driver等开发,Microsar OS主要基于经典autosar方法进行通讯、诊断、及系统功能安全等开发,通过SoC自带的2个R5核锁步设计,取代独立的MCU。
图片来源:知行科技
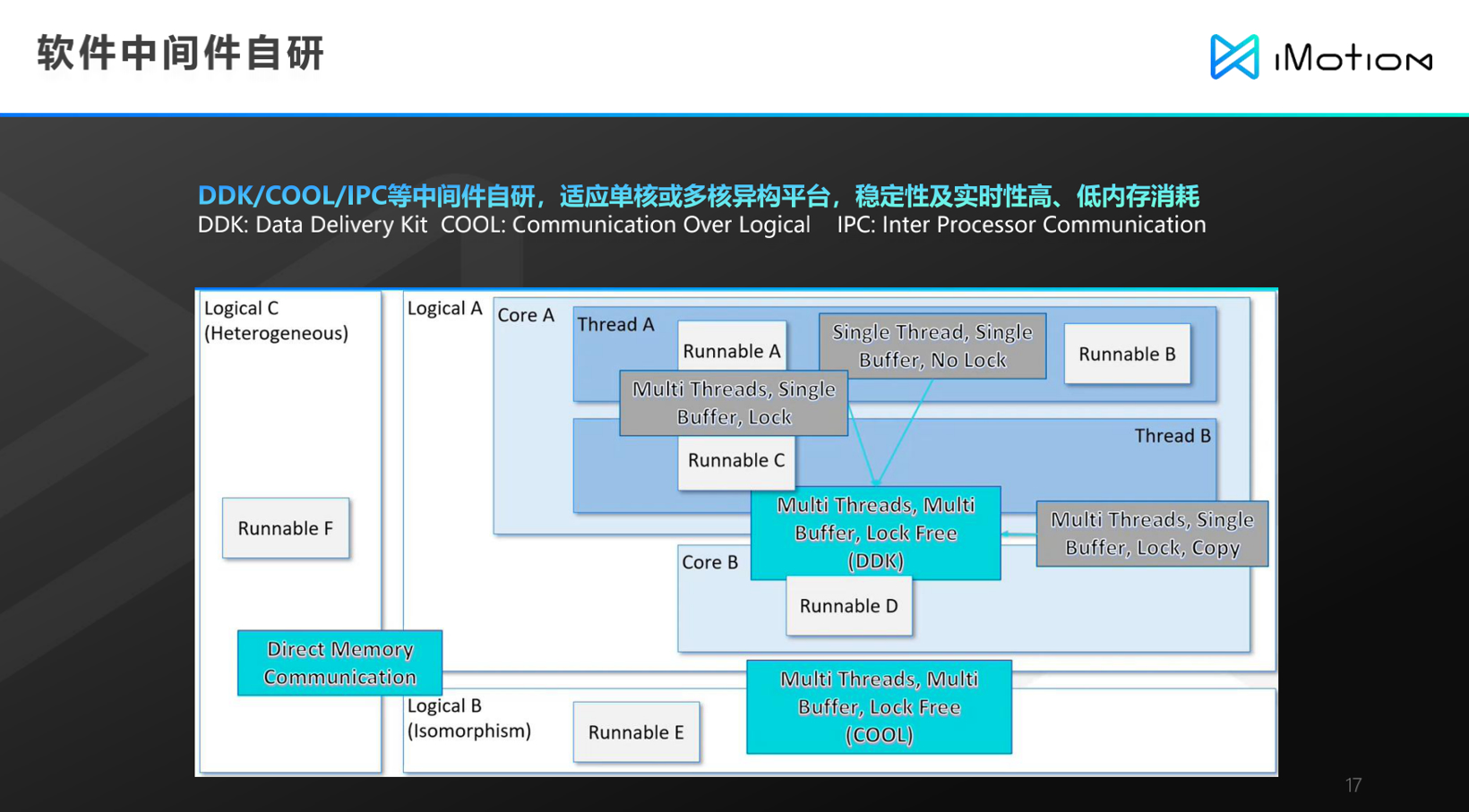
为了提高中间层和应用层链路的开发效率,在iDC平台中,我们主要从运行环境和视觉的抽象层两个模块进行中间件的自研。针对运行环境,我们开发了DDK、COOL、VFC等中间件。
DDK主要负责模块之间的通信,不仅是同构之间的通信,还能支持异构核之间的通信。VFC主要是对数据类型进行标准化封装,能实现不依赖第三方的数据类型。COOL主要负责不同操作系统之间的通信,实现零拷贝的高效数据共享,这对我们提高带宽、优化带宽设计十分重要。
图像层的自研开发目的主要是实现应用层和底层图像数据之间的解耦,提高适配不同SoC时功能移植与适配效率,使视觉感知、规划等算法不与硬件强关联,从而能大大提高对新平台的适配效率,目前iDC平台软件代码接近500万行。
在视觉算法开发上,目前我们在iDC平台已经完成了轻量化AI模型的搭建,支持多场景、多目标的识别能力,不仅支持目标3D障碍物输出以及一般障碍物检测,还支持车道线、车位线检测,以及Freespace辅助泊车探测。
面对多链路图像预处理的多样性需求,如果没有经验丰富的工程开发团队,能够对SoC进行深度部署及链路的优化,将对平台的开发带来巨大挑战。在开发过程中,我们深度挖掘硬件资源,并通过自研算法对芯片的内核进行二次优化开发。经过深层次的二次开发后,我们在高频的输出率上达到了高帧率,负载也相对较低。这是在开发过程中的一个基础环节,也是非常重要的环节。
在开发过程中,我们也通过创新解决了很多场景的问题。在开发过程中,记忆泊车是比较有挑战性的问题,一般的中高端车型都有相应的配置需求。如何在进行性价比开发的同时,又能对系统解决方案进行轻量化?在没有高精度IMU时如何实现高精度定位?在场景下的波段变化怎么识别?这些都是我们在现实开发当中遇到的问题。
在实际开发过程中,我们基于语义分割、vSLAM、高精度里程计等多重信息的融合,在不依赖任何第三方的设备下,实现了HPA记忆泊车接近厘米级的高精度定位。
另外,360全景环视也是视频链路上的关键功能。360全景的配置不仅是新手的需求,对于“老司机”而言也能提高人机协同的效率,可助其快速完成泊入。
知行科技基于在算法端做到的高帧率输出,我们在360全景功能上也将为大家呈现沉浸式全景功能体验。结合逼真的拼接效果、及时的自动视角切换、均匀的动态拼接、高清透明底盘、炫酷的车模操作,我们将提供沉浸式的全景体验。
为了达到更好的产品用户体验,我们建立了AR HMI开发小组,充分发挥SoC中GPU较强渲染能力,实现人机交互界面的环境模型3D渲染,可支持多种环境模型高保真渲染。
泊车系统的关键在于识别,我们基于整个iDC平台打通了数据闭环链路,持续迭代泊车感知算法。目前车位目标识别数已经超过了20种。结合Freespace感知算法的融合,我们实现了多种目标识别,能有效识别例如车库内的购物手推车、垃圾桶、栅栏、减速带等。
有了感知算法的背书,再结合拟人化的规控算法,自动泊车系统就能实现类似老司机的泊车效率及体验。
在国家安全合规的框架下,知行科技基于数据云平台进行数据闭环的搭建,并于数据处理、数据标注、数据检查及数据管理系统均实现自研,能支持我们在不同阶段进行算法训练。在数据分类标注及管理上,我们还在做进一步的效率优化。
知行科技在标准流程体系化上提供安全认证,并已经完成了网络信息安全体系的相关建设。同时我们也在参与国家相关标准的编撰,积极贡献我们在开发过程中积累的经验。

图片来源:知行科技
知行科技的生态正在逐步壮大、快速发展,这里要特别感谢在成长过程中积极支持和鼓励知行科技业务发展的行业伙伴们。
(以上内容来自知行科技产品总监司正敏于2022年11月15日由盖世汽车主办,上海虹桥国际中央商务区管委会、上海闵行区人民政府指导,上海南虹桥投资开发(集团)有限公司协办的2022第二届智能汽车域控制器创新峰会发表的《高性价比域控的差异化开发探索》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202211/23I70322566C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921