新一代的智能汽车地图,是与智能驾驶深度融合、与智能座舱紧密交互的“活地图”。然而,城市点到点辅助驾驶对地图有着极具挑战性的需求,需要高精地图深度覆盖、要素丰富、并能表达复杂且有中国特色的场景。
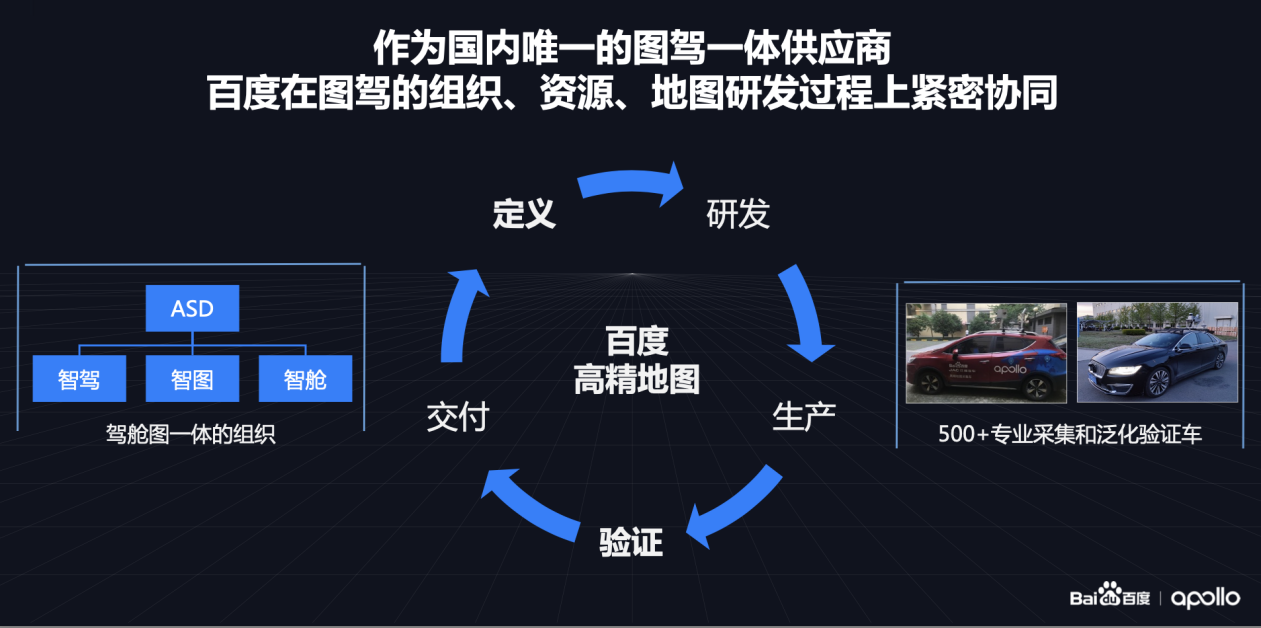
2022年9月14日,由盖世汽车与武汉大学测绘遥感信息工程国家重点实验室联合主办的2022第四届自动驾驶地图与定位大会中,百度智驾地图业务部资深技术经理余威表示,作为国内唯一的图驾一体供应商,百度在图驾的组织、资源、地图研发过程上紧密协同。
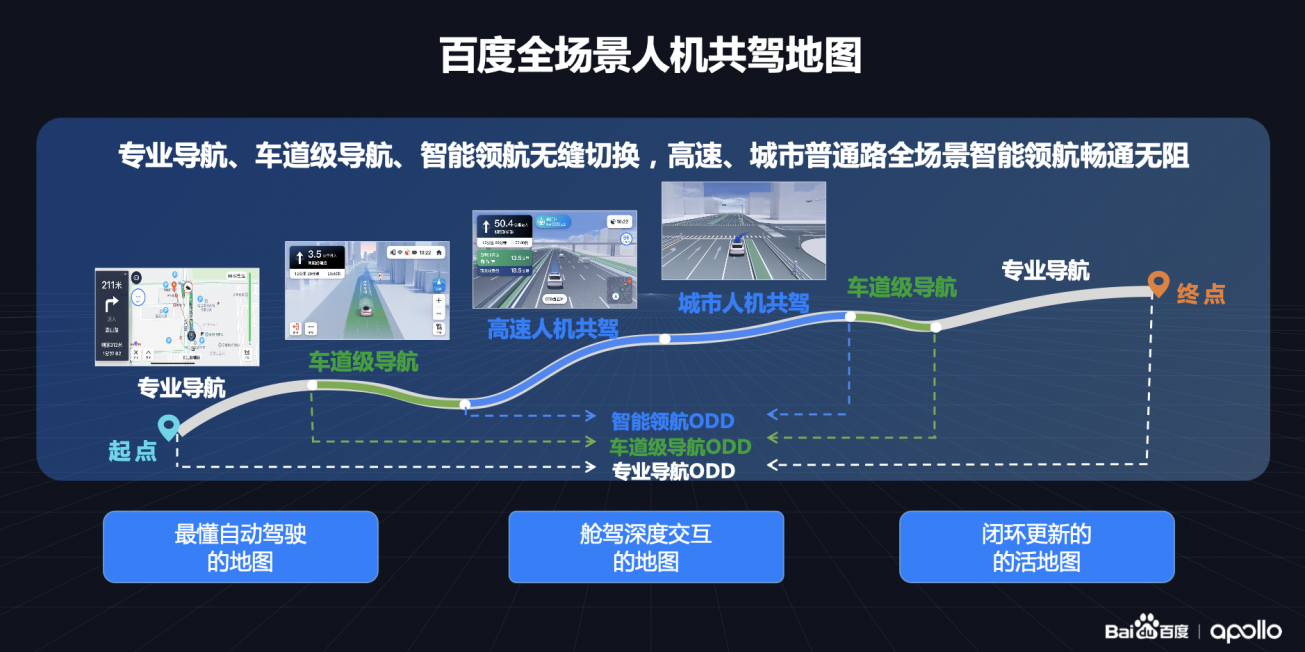
百度一直致力于做最懂自动驾驶、驾舱图深度融通的新一代智能汽车地图,通过专业导航、高精车道级导航、高速人机共驾、城市人机共驾无缝切换,百度全场景人机共驾地图能实现高速、城市普通道路全场景的智能领航。以下为演讲内容整理:

余威 | 百度智驾地图业务部资深技术经理
业界高精地图从2014-2015年开始启动研发,到了2020年我们称之为高精地图的量产元年,经过2021年的快速发展,当前也面临着一些新挑战。今天我会结合百度当前的一些实践和思考,和大家一起分享。
智能汽车地图行业趋势
关于智能汽车地图的行业趋势大家都聊得比较多,这里我再赘述两个观点。
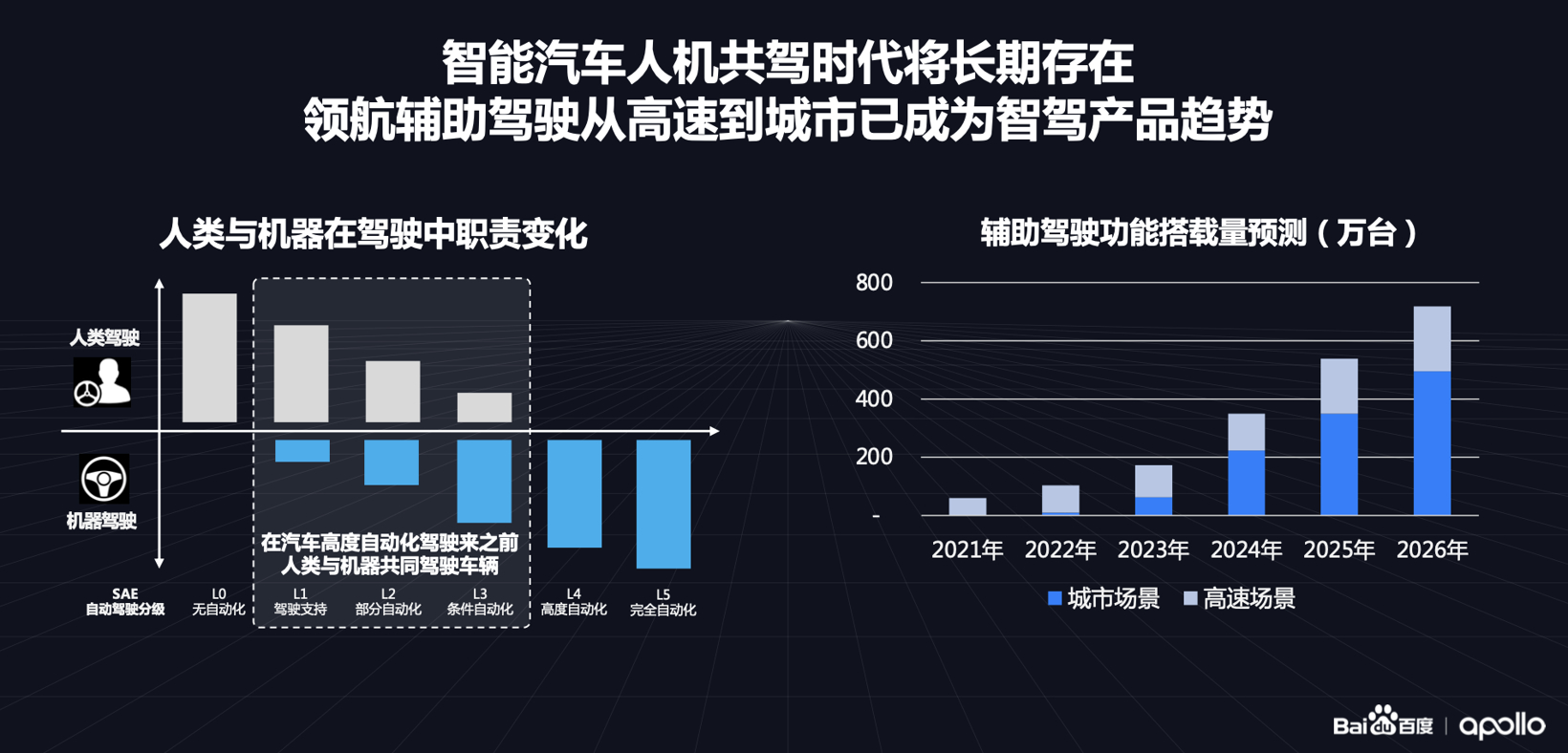
第一、人机共驾地图时代将长期存在。按当前自动驾驶的发展来看,我们可以看到的是在高度自动驾驶来临之前,人类驾驶员和机器共同驾驶车辆的时长将长期存在,包括L1、L2、L3的阶段。
第二、领航辅助驾驶从高速走向城市已经是必然的产品趋势。预计2026年L2+的渗透率会达到30%-40%,其中城市L2+会占到很大一部分,并且以一个非常好的YoY在增长,到2026年城市领航辅助驾驶的搭载量将会超过400万台。
图片来源:百度
在上述智能驾驶产品的趋势对地图也相应有了新的需求。智能驾驶从高速走向城市,城市复杂的场景加重了驾对图的依懒,需要地图更懂自动驾驶。智能座舱的快速发展包括8295的应用,以及智驾HMI安全感的需求,需要舱驾图在交互上紧密配合。同时驾、舱对高精地图的深度应用,需要高精地图能够闭环地快速更新。所以新一代智能汽车地图是与智能驾驶深度融合、与智能座舱紧密交互的活地图。
智能汽车地图关键挑战——最懂自动驾驶
城市点到点辅助驾驶对地图提出了极为挑战的需求,点到点的智能领航需要高精地图深度覆盖,频繁接管的智驾功能没有产品价值的,地图覆盖一定需要保证功能的连续使用。1-6级路也就是红色道路的覆盖3%路线,1-7级路也就是红色加绿色的道路能够覆盖97%的路线。所以百度的高精地图做到7级路。第二,城市辅助驾驶需要地图要素表达更丰富,包括路口的、障碍物的。同时,城市辅助驾驶需要地图能够表达复杂的有中国特殊的场景。比如这个路口有个障碍物,这个路口可以直行但没有直行的lane marking。
面对这样的高精地图需求我们应该怎么做?作为国内唯一的图驾一体供应商,百度在图驾的组织、资源、地图研发过程中紧密协同。从组织上看,百度的智驾、智图、智舱都在百度的ASD智能汽车事业部下。在资源方面,作为图商我们不仅投入了大量的地图采集车,还投入了大量搭载ANP辅助驾驶功能的泛化验证车。研发流程上,在地图的定义、研发、生产、验证、交付的过程中我们一直保持着图驾的紧密迭代。
图片来源:百度
作为高精地图供应商,大家应该都有一个比较困惑的地方,就是定义什么样的地图就能够满足辅助驾驶的需求?地图的质量做到什么样子就是qualify的?
从百度的实践来看,我们在地图的定义上采取的方式是智驾的经验沉淀+地图要素定义有机融合。比如为了支持特殊路口无保护左转,我们通过沉淀百度Robotaxi的大量的轨迹经验,来做路口里面的车道连接线和车道的挂接关系。
在地图验证上可能大家关心的是高精地图是不是一定要把精度做到最高。然而在我们高速高精地图的量产过程中发现,客户给我们反馈最多的不是精度问题,而是限速和施工的问题。在城市辅助驾驶研发过程中,我们也发现就算精度都做到了20厘米内,但城市领航辅助驾驶还是会因为地图出各种各样的问题。
为此我们在地图验证上定义了三级质量保证体系,最底下是传统地图生产的质量保证体系,以精度、准召率为指标。在这个基础上我们定义了地图的出品验证,其中包括地图制图过程中的准出验证、地图产品化的准入验证、地图引擎的仿真验证等。除了出品验证还有做舱驾的仿真验证,我们会投入大量验证车辆去做驾和图的实车验证,验证车会搭载智驾的功能,会搭载智舱的人机共驾地图去做地图的泛化。
地图的出品验证和舱驾应用验证不再由传统地图指标驱动,而是以应用的百公里P0/P1/P2等指标来验证。通过上面两层的验证来保证舱驾应用的可用性
智能汽车地图关键挑战——驾舱图深度融通
智能汽车时代的地图,作为智驾驶系统的核心能力和HMI,需要驾舱图在系统架构、地图数据和产品技术上紧密交互。下图是典型的地图在领航辅助驾驶系统中的系统架构:

图片来源:百度
领航时,智能座舱中的人机共驾地图或车机地图导航的路径会发送给智能驾驶系统的高精地图,在高精地图做车道级的定位和路径到高精地图的转换,再把高精地图的路径发送给智驾系统,从而实现基于导航的领航辅助驾驶功能。同时智驾系统里面定位、感知、PnC的信号也会发到智能座舱中,来做人机共驾以及相关的渲染和功能。
要实现这个功能并确保舱驾一致的体验,底层需要SD和HD数据一张地图来支撑。在做高速的领航辅助驾驶时,我们通过SD和HD匹配的算法,加上人工修复,可以实现高速场景SDHD近乎百分之百正确率的关联。但是在城市普通路或者说越往低等级的道路,SDHD关联就没法做,因为有可能某些SDHD的路形和拓扑因为制图工艺等原因就不一样,这样SD发过来的导航路线在HD中就找不到,对应caes的城市NOA就没法实现。
为支撑城市领航辅助驾驶,百度实现了SDHD一体化AI地图生产平台,即数据一张图。从架构上来说,一体化地图生产平台基于一份路网的架构,定义了统一的SDHD地图数据规格,定义了能够保证SDHD一致更新的工艺流程,采用高度自动化的方法来做地图处理,进行SDHD一体化生产作业。这样的数据一张图最终能用于支撑智驾的辅助驾驶功能,以及智能座舱中的人机共驾、车道级导航、专业导航的功能,并能保证舱驾在应用上的体验一致。

图片来源:百度
在功能上舱驾图更需要深度交互,来增强领航辅助驾驶安全体验和信赖感。
第一、在交互上,百度语音助手“小度小度”的输入会通过地图传给自动驾驶系统,在智驾系统里实现端到端的语音交互,使辅助驾驶系统的操作一语即达,同时实现辅助驾驶系统对人的语音主动引导。
第二、在渲染上,辅助驾驶系统的状态如是否可开启领航,感知的周边车辆、障碍物,PnC的换道和接管提醒等都会从辅助驾驶系统传到智能座舱系统,和地图深度融合渲染,最终提升辅助驾驶系统的安全体验和用户信赖感。
第三,从定位的角度来看,百度有业界领先的高精定位。在舱驾融的条件下高精定位的信号会发到车机,来做车机定位的增强,车机也可以接收智驾系统的传感器信号,在车机中进行多传感器的融合定位,进而能够提升车机地图的定位尤其是特殊场景的定位准确率,同时也可以支撑车机地图实现真正的车道级导航功能。
智能汽车地图关键挑战——闭环更新活地图
舱驾对地图的深度应用对高精地图更新提出了更大的挑战,据我们统计一个季度城市地图大概会有20%的变化,如果地图不能快速更新,地图产品以及地图支撑的舱驾产品在定义上就是不成立的。
地图更新的关键技术在众包,其中的关键问题在于数据源。百度拥有中国最大的地图数据生态,其中包括6亿C端用户,以及百万辆智能汽车的终端,百城市V2X的路侧终端,这些数据能够支撑地图中动态信息的实时更新,以及静态数据的分钟级更新。
当前我们在高精地图和智能驾驶之间已经打通了数据闭环,地图更新的模块已在百度ANP产品中搭载,能够实现城市地图要素20厘米精度更新,实现地图在通勤路线上常用常新的功能。
百度智能汽车地图解决方案
百度智能汽车地图一直以来专注于做智能汽车时代最好用的地图,核心产品矩阵有百度地图汽车版也就是车机地图、百度高精地图包括高速、城市的产品,以及我们最新推出的百度人机共驾地图。

图片来源:百度
百度全场景人机共驾地图是百度车机地图和高精地图以及百度制图能力的集大成者,提供面向智驾的人机交互体验产品。其中集成了百度最懂自动驾驶、舱驾图深度融通,以及数据闭环更新的能力。实现了专业导航到高精车道级导航,再到高速场景智能领航、城市场景的智能领航,实现从起点到终点的无缝切换。
图片来源:百度
百度一直以来都致力于用科技改变世界,在智能汽车领域,百度专注于做智能汽车时代最好用的地图,当然在这个过程中离不开我们客户还有合作伙伴的信赖支持,也离不开我们广大业界朋友和用户的关注,在这里谢谢大家!
(以上内容来自百度智驾地图业务部资深技术经理余威于2022年9月14日由盖世汽车与武汉大学测绘遥感信息工程国家重点实验室联合主办的2022第四届自动驾驶地图与定位大会发表的《新一代智能汽车地图》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202210/9I70316409C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921