盖世汽车讯 据外媒报道,京都大学(Kyoto University)的研究人员已经在虚拟现实中使用局部观察迷宫,结果发现可以从大脑活动中解码受试者预测位置和场景的能力,以及他们对预测的信心程度。
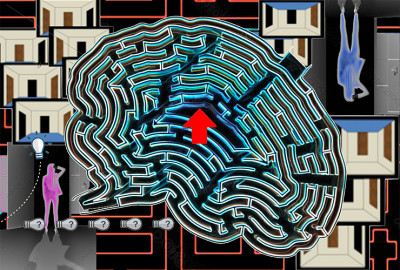
图片来源:京都大学
该研究主要作者Risa Katayama说:“基于人类大脑活动的人工智能模型表明,场景预测的解码准确性取决于受试者预测能力的置信水平。”
在假设的世界末日场景中,受试者通过将每个场景预测与观察到的场景进行比较来浏览一系列场景,从而确认或更新之前的VR。该研究团队研究了人工智能是否可以解码受试者所经历的每个VR的神经元表征,或许相关的自信水平是否会影响预测的重现方式。
大脑活动通过功能性磁共振成像(fMRI)测量,而受试者则参与VR迷宫游戏。尽管不知道最终目的地,但受试者似乎能够使用预测和地图记忆来帮助估计他们在迷宫中的位置,并选择正确的前进方式。
Katayama称:“我们的结果表明,当预测置信度高时,受试者能够清楚地想象场景并快速预测。”这项研究可能对不断发展的元宇宙研究领域产生广泛的影响。虽然场景预测是基于迷宫中的门布置,但它可能会导致脑机接口的发展,以用于各种环境的通信工具。
Katayama总结道:“场景预测可以推广并带来新的应用,例如连接人类大脑的控制方法和用于空中和陆地车辆的人工智能。我们相信人类思维和人工智能的交接对于进一步阐明我们自我意识的来源具有跨学科意义。”
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/news/202208/4I70309716C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921