
电子电气架构的未来是什么?中央计算机+区域架构或许是共识性的行业构想。
区域化域控架构下,目前流行的五大功能域将进一步融合,而舱驾合一则是其中被炒的最为火热的话题。
在座舱和网关领域业务水平趋于成熟的均联智行,已开始在智能驾驶领域展开布局,其业务扩张的力度,正取决于座舱业务同智能驾驶业务融合的可能性。
均联智行AD首席架构师汪浩伟看来,软硬件解耦的大趋势下,针对即将到来的“中央大脑”时代,车机设计将从以功能为核心转变为以体验为核心,用户思维和用户核心价值将成为智能驾驶落地量产的关键点。

图片来源:均联智行官网
功能域的下一步:舱驾合一?
汽车电子电气架构发展至今,分布式ECU已接近瓶颈,智能汽车集体迈进域控制时代。
ECU向域控制转变是行业需求升级的结果,最主要解决的就是集中式计算和分布式连接两大问题:
其中,集中式计算是将同一功能区的ECU统一整合至域内,减少算力冗余、提高核心性能。分布式连接则解决了传统架构中信号在子网络中重复发送的问题,域内统一连接,优化线束问题,更易于管理和后期调控。
从单一域控走向域融合,不同的主机厂有不同的理解和做法。技术路线虽然各有不同,但做法与目的是一致的,即将部分的域功能先统一到一个平台内。逐渐聚合更多的功能域,直到走向彻底的中央计算平台。

图片来源:均联智行 汪浩伟
功能域控不同于区域化控制,市面上流行的功能域划分主要是动力域(安全)、底盘域(车辆运动)、座舱域(信息娱乐)、智能驾驶域(辅助驾驶)和车身(车身电子)域。功能域各自有主要的域控制器,通过CAN/LIN等方式连接至主干线,实现整车数据交互。
区域化域控制是功能域控制进一步集成化的结果,具体实现路径是域融合集中化方案。将适合整合为区域的离散型功能部件集中化,有利于中央计算性能的优化。
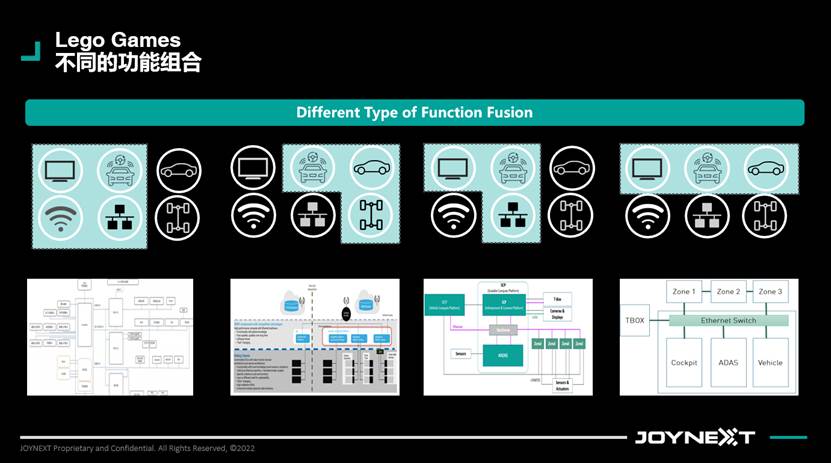
图片来源:均联智行 汪浩伟
汪浩伟提到,均联智行目前在座舱域、智能驾驶域以及与智能网联的结合上有所布局。
未来,L2.9 ADAS与HPC(高级别驾驶辅助+全功能智能座舱)结合的域控制器将成为域融合发展的主流。随着座舱和智能驾驶功能域的发展,系统复杂性和交互程度都会提高,舱驾融合的域控技术可以避免不必要的冗余,较好的规避当前自动驾驶的技术瓶颈,以更快实现大规模量产。
体验驱动+用户核心价值 域控方案的未来方向
中央计算机+区域化融合的大潮下,域控方案的设计思维必然随之改变。
目前,区域控制器的设计方案主要有三种类型,第一种类是以网关(Gateway)为核心,使用最原始的方式将信号接入至区域控制器。这一种可以被看作是区域控制网+BCM供电,叠加底层纯硬件设备和驱动,信号被主要被传入中央电脑进行处理。
第二种是将原子服务部署在区域控制器上,此时中央电脑和区域控制器通信已经转变成了以服务API(API Gateway)为基础。
第三类是现在还未完全出现的区域控制形态。在区域控制器上存在基础和高阶服务。比如将Edge Computing和Edge AI(边缘计算)运行在区域控制器中;以及将智能驾驶的功能融合在区域控制器内,这种形态会在未来中央大脑+区域架构起到关键性的作用。
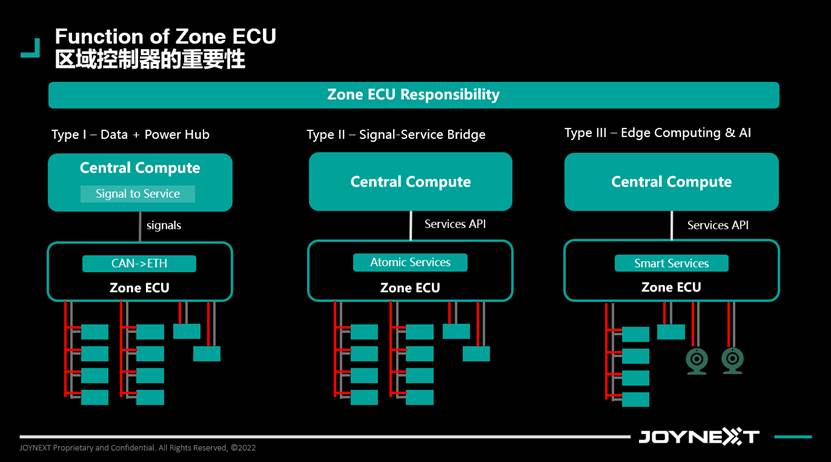
图片来源:均联智行 汪浩伟
以上三类区域控制器的设计方案,其实也就是控制器从功能域控架构转向中央大脑架构的升级路径。
伴随集成升级,可拓展的电子架构会采取类似的硬件设计、i/o接口,满足对不同车型拓展的需求。而软件区域不再受到硬件的制约,有更大的发展空间。
在汪浩伟看来,传统整车视角下,功能为导向的设计思路,在软硬件解耦的大趋势下,终将被替换为区域视角下,用户体验为导向的设计思路。成熟高阶的自动驾驶产品从用户角度出发,需考虑合理的价格、可靠的安全性、舒适性、智能以及产品质量等综合因素。
安全至上 理性的智能化设计
目前的智能驾驶技术发展中,安全和智能在某种程度上存在矛盾之处。比如辅助级别的TGA和完全自动驾驶L3以上级别的TGP,两个系统功能层面相同,但是对于安全的要求使得其复杂程度和成本迥异。
对后者而言,更贵的传感器,更强的感知,以及更多的冗余,这些不光带来成本的上升,也带来设计上的挑战。
因此需要在设计系统时就明晰安全边界,因为系统的成本框架会定义其复杂度,也就是定义其不同场景的功能和安全极限。

图片来源:盖世汽车
要满足高阶的安全性需求,在功能安全、信息安全、SOTIF框架下对系统反复设计和验证、针对不同场景的安全驾驶策略、突发事件处理方案,这些维度都需要考虑到。
再来看安全冗余,它强调多重备份以增强系统的可靠性,级别越高,安全冗余要考虑的情况就越多。
总的来说,均联智行域控制器功能安全设计的总体目标,包含支持安全自动驾驶,统一的安全诊断机制、安全通讯机制、安全状态管理,以及对于SOTIF的支持。
座舱+自动驾驶 软件开发深度融合
就软件定义来看,均联智行的理想开发状态是如SOAFEE(Arm提出的开源软件架构)所预想:用云原生的方式来开发汽车软件。
而目前的SOA架构下整体方案是将座舱和智能驾驶的软件框架进行深度融合,其设计的一套原子服务,既可以被座舱域使用,也可以被智驾域使用。
汪浩伟强调,SOA替换传统信号传输,进入到微服务设计阶段,再到将云开发同汽车开发相统一,这是对于未来的构想。然而当下,SOA仍然以替换CAN为核心。这主要由于车机同互联网的定义不同,车机的系统每一步都将影响到物理呈现,和传统云原生的思路不同,各种设计规范仍待修改完善。

图片来源:均联智行 汪浩伟
软件定义汽车,是智能汽车发展趋势下传唱最广、也最具有想象空间的一句构想。然而如何让软件设计量产落地,如何在域控架构和受众需求间架桥,厂商在攻克科技产品,还是在打造实用良品,这两者并不一定是矛盾,只是需要更好的平衡,均联智行对于体验驱动的产品设计构想,或将构成这座桥梁建设的关键一步。
(以上内容根据均联智行首席架构师汪浩伟在2022年6月29日由盖世汽车主办的2022第二届智能汽车域控制器创新云论坛发表的《融合域控制器的规模化量化挑战》主题演讲进行理解和整理。)
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/news/202207/22I70308358C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














