
8月26日,由盖世汽车主办的“2021行业首届智能汽车域控制器创新峰会”于上海汽车城瑞立酒店隆重召开。本次会议持续两天,将围绕智能汽车、智能驾驶域控制器、智能座舱域控制器、底盘及车身域控制器、智能驾驶计算平台、电子电气架构、软件定义汽车、车规芯片等行业焦点话题展开。会议期间,采埃孚VMC软件负责人方高明发表了《采埃孚车辆底盘集成控制 》的主题演讲。以下为演讲实录,供参考。

图为:采埃孚VMC软件负责人 方高明
演讲实录:
大家下午好,接下来跟大家介绍一下采埃孚车辆底盘集成控制。
着眼于下一代移动出行方案和零愿景的战略目标,采埃孚定义了所关注的四大技术领域:自动驾驶(Automated Driving),车辆运动控制(Vehicle Motion Control),集成式安全系统(Integrated Safety),电驱动(Electric Mobility)。今天要介绍的是其中的车辆运动控制VMC。
下面将从四个方面带大家对采埃孚VMC有一个认识。
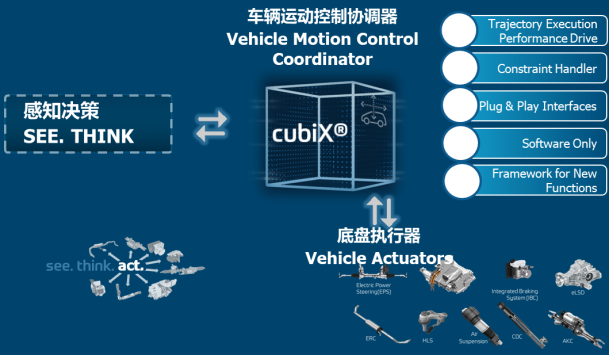
采埃孚作为传统老牌底盘件的供应商,在底盘相关系统专业领域具有比较广泛和深厚的技术积累。同时在底盘系统相关产品方面也有全面的覆盖,比如说前轮转向系统,后轮转向系统(AKC),制动系统(如IBC one box),还有电驱动,悬架系统(如半主动阻尼器CDC、主动阻尼器S-Motion、主动横向稳定杆ERC等)。采埃孚在底盘专业领域以及相关产品方面深厚的技术积累为VMC提供了一个比较大的优势。
采埃孚VMC具有自己的软件产品,称为cubiX®。cubiX®作为车辆底盘集成控制的协调器,在移动出行方案中起到承上启下的作用。对于整个车辆系统而言,最上层是所谓的感知决策层,通过对传感器信息的处理和相关控制算法的决策规划,计算出期望的车辆运动目标。这里的感知决策者可以指辅助驾驶系统或自动驾驶系统控制器,当然广义来讲也可以是驾驶员人为对车辆的操控。最下层是整车底盘执行器,比如说转向,制动,驱动和悬架。上层感知决策所计算出的目标或者来自于驾驶员期望的目标,最终是要由底盘各个执行器去执行实现掉。而VMC便是在感知决策层和执行层中间抽象出的车辆运动控制抽象层。VMC的软件cubiX®,作为车辆运动控制的中央协调器,会将接收到的上层控制目标进行分解,通过内部的车辆运动控制算法分解出各个底盘执行器的控制指令,如目标后轮转角、目标制动、驱动力等,进而综合利用各个执行器实现期望的车辆运动目标。

cubiX®作为底盘控制的中央协调器具有一些特点。
首先,既适用于人工驾驶情况(cubiX® PD, Performance Drive),也适用于辅助驾驶和自动驾驶情况(cubiX® AD, Trajectory Execution)。而对于辅助/自动驾驶,cubiX®可以从车辆动力学等方面综合考虑车辆对目标轨迹的执行能力,并将这个执行能力以轨迹约束(Trajectory Constraints)的形式反馈给上层控制器,进而保证决策层规划的路径是可执行的,做到类似于规划和执行的闭环。
另外,cubiX®作为承上启下的中间层,如果将对上对下的接口做标准化的定义,可以做到“即插即用”(Plug & Play Interfaces),具有灵活性和可复用性,并将上层控制器和下面执行器进行解耦。其次,cubiX®作为软件产品(Software Only),它可以较为灵活地集成运行于具有相应能力的控制器硬件上,其模块化的软件设计使它在功能上具有可扩展性,可以扩展或者开发更多具有附加值的新功能(Framework for New Functions)。
性能驾驶方面,cubiX® PD依托于采埃孚在车辆运动控制和底盘执行器方面的专业能力和技术储备,可以实现人工驾驶时车辆驾驶性能的改善,包括对车辆操控性和驾驶稳定性的综合提升,同时还可以实现客户对驾驶特性定制的需求。
辅助/自动驾驶方面,cubiX® AD从车辆动力学等方面综合考虑车辆当前的轨迹执行能力,并将对应的轨迹约束反馈给上层控制器;上层控制器只需要从车辆运动学或者几何关系的角度考虑目标轨迹的规划;而对于目标轨迹的执行完全交由cubiX®负责。这样一来,上层控制器可以专注在对自己感知决策算法的设计与优化,而对车辆动力学的考虑和轨迹执行当中涉及到的底盘控制则交由更为专业的cubiX®进行,即可以做到所谓的“专业的人做专业的事”。
接下来给大家介绍一下VMC控制功能的情况。
基于车辆的动力学状态,我们将车辆的行驶工况分为正常驾驶区域,动态操纵区域,以及更加接近动力学极限的稳定性控制区域。而cubiX®功能的控制目标更多着眼于在驾驶中更常出现的正常驾驶区域和动态操纵区域。
cubiX®功能可以通过综合利用整车上可以利用的执行器,比如说驱动/四驱、前轮转向、后轮转向、制动、悬架等系统实现期望的车辆运动目标和驾驶性能改善。
比如cubiX® PD的可变驾驶特性功能,用来在车辆行驶工况的正常驾驶和动态操纵区域改善车辆的响应性能,提供更为舒适或符合驾驶员意图的车辆响应。该功能可以通过综合利用各个执行器,包括四驱、后转、制动、主动横向稳定杆、电子阻尼器等,实现车辆性能的改善。
又比如cubiX® PD的预稳定性控制功能,用来在车辆行驶的动态操纵和稳定性控制区域为车辆提供更好的稳定性。该功能会在传统的ESC稳定性控制介入之前,通过综合利用四驱、后转、制动、主动横向稳定杆、电子阻尼器等可以利用的执行器,实现驾驶稳定性的改善。
还比如cubiX® AD的轨迹执行功能,以及轨迹执行功能的拓展与应用——四轮转向泊车,将接收的目标轨迹进行分解,得到目标的方向盘转角、后轮转角、制动力、驱动力,实现对轨迹的跟踪。
接下来结合整车应用场景对cubiX功能和控制目标做进一步的阐述。
按照车速从低到高的驾驶工况来看,对于低速的驾驶工况,VMC主要关注的是对车辆转弯半径的减小,实现更为敏捷灵活的驾驶响应。人工驾驶时,cubiX® PD的低速灵活驾驶功能通过控制后轮转角,使后轮转角相对于前轮转角进行反相偏转,进而实现转弯半径的减小,改善驾驶的灵活性。在自动驾驶的情况下,将后轮转角引入到对目标轨迹的规划当中,cubiX® AD的四轮转向自动泊车功能在进行轨迹执行时也同样将后轮转角考虑在内,这样可以在自动泊车时实现更小的转弯半径,减小对库位尺寸的要求,也可以减少泊车时的库位内调整次数,提高泊车成功率。
对于中速或中高速的驾驶工况,VMC主要关注的是更为舒适灵活的车辆驾驶特性,在正常行驶和动态操纵区域使车辆响应更为敏捷灵活,此时,cubiX® PD的可变驾驶特性功能可以实现对车辆驾驶特性的调节,实现偏向不足转向、过度转向或中性转向的驾驶特性。
对于更高车速的驾驶工况,此时为车辆提供更为稳定的车辆响应更为重要,更为稳定的车辆响应也可以为驾驶员提供更多信心。此时,cubiX® PD的预稳定控制功能,配合可变驾驶特性功能,可以起到对车辆稳定性的改善。预稳定控制功能通过对整车横摆的闭环控制,旨在在ESC稳定性控制介入之前,弥补车辆的不足转向或过度转向的趋势,并尽量使用除制动以外的其他执行器,可以减少ESC介入或推迟ESC介入时机,减少驾驶过程中的制动干预,改善NVH性能。
此外,cubiX® PD的对开路面控制功能,能够通过对前轮转向、后轮转向的控制,实现对车辆在对开路面加减速时因左右轮非对称制动力产生的车辆横摆进行补偿。该功能可配合传统的ABS功能,车辆的横摆控制交由cubiX® PD的对开路面控制功能,而车轮的滑移控制(即防抱死)交由ABS,这样如果ABS采用更为激进的控制参数,二者配合可以综合实现减少驾驶员修正车辆横摆时的转向介入以及减少车辆的制动距离。
对于cubiX® AD,在中高速时的功能主要是对目标轨迹的执行,而通过将cubiX® AD与cubiX® PD集成为一体,可使cubiX® PD的相关功能在轨迹执行时同时进行作用,可使对目标轨迹的跟踪更为精准舒适。
最后再给大家介绍一下VMC适应未来电子电气架构的产品方案。
首先,VMC的软件适用于传统基于信号的软件架构(Signal-Based),此时,集成了cubiX®的ECU从总线接收或发送相关的信号,并通过Classic AUTOSAR的RTE实现相关信号与cubiX®的交互,这种基于信号的软件方案也可以做到决策层与执行层的解耦。
同时,VMC的软件也将适应未来电子电气架构的发展趋势,适用于面向服务的(SOA)电子电气架构。这个时候cubiX®会基于Aaptive AUTOSAR进行开发,并可运行在搭载了采埃孚中间件(ZF Middleware)的高性能计算机平台(如ProAI)或其他软硬件平台,此时cubiX被定义成了服务(Service)的形式,可以通过API进行调度。在软件定义汽车大趋势下,采埃孚VMC也将为客户提供更为灵活开放的软件、系统方案,以及更多的附加价值。
我的介绍就到这里,谢谢大家。
本文地址:https://auto.gasgoo.com/news/202108/30I70270583C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921













