

盖世汽车讯 据外媒报道,美国专利商标局(U.S. Patent and Trademark Office)公布了苹果公司泰坦项目相关的一项专利,能够帮助自动驾驶汽车安全变道。
(图片来源:https://www.patentlyapple.com)
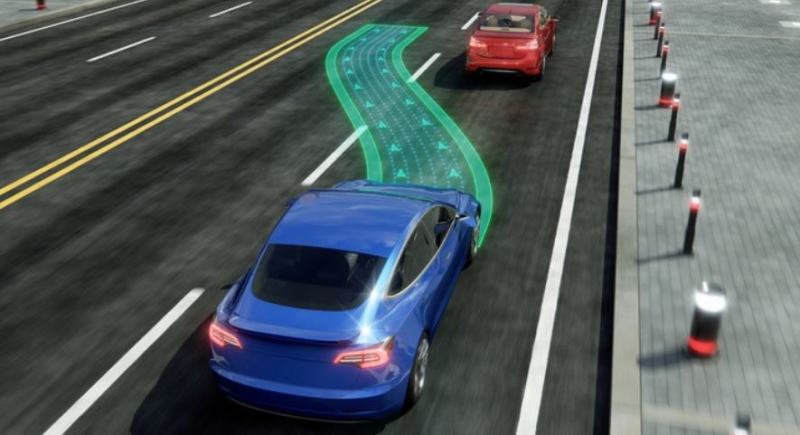
苹果公司指出,该项专利描述了车辆自动执行变道操作的综合决策和运动规划解决方案。专利系统所包含的决策组件可以确定自动驾驶汽车所要遵循的行为模式,运动规划组件则可以确定执行变道操作的实际变道轨迹。
这些组件可以协同工作,有效地实现安全变道,如生成不会发生碰撞的驾驶轨迹,并将车辆动力学与乘员舒适度相结合。决策组件可以确定限制或目标,运动规划模块可以使用这些限制或目标,集中搜索成功变道轨迹。这些流程可使车辆控制系统作为一个整体,考虑更大范围或更多类型的潜在变道运动。
车头时距是指行驶在同一车道上的两辆车之间的距离,也表示以后车当前的速度,行驶完两辆车之间距离所需时间。最小车头时距限制规定了车辆之间应保持的最小时距,也可能是车速的函数,例如,车速越快,保持的时距就应该越大。
最小车头时距限制可由道路法规则决定。在车辆控制系统设计中增加最小车头时距限制,可以提高安全性。被控制车辆前方的车辆所保持的最小时距可能与其后面车辆所保持的最小时距不一致。
如下苹果专利图 FIG. 5为确定运动计划的示例流程图。
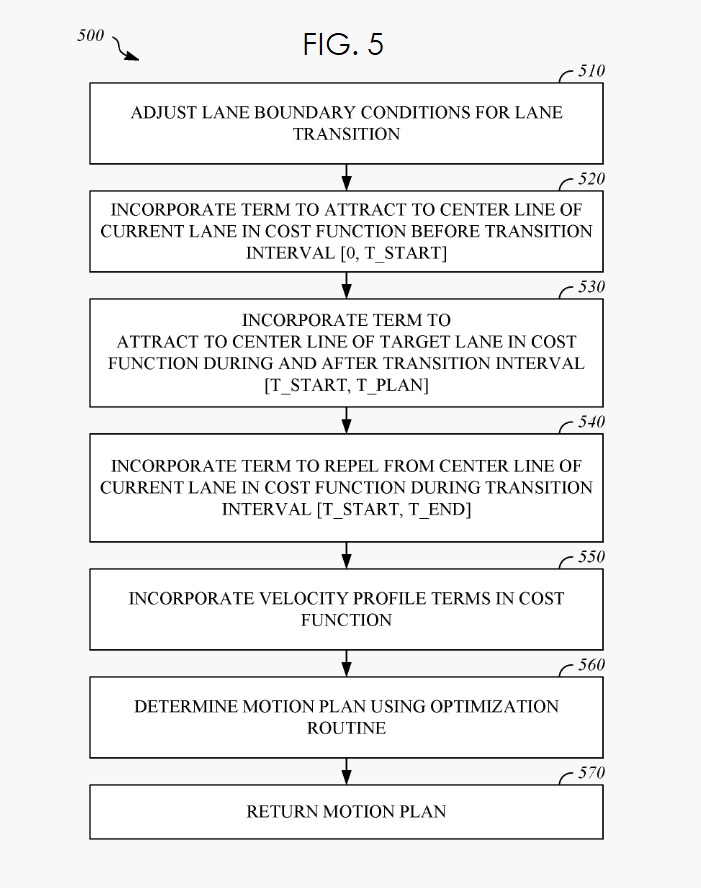
(图片来源:https://www.patentlyapple.com)
如下苹果专利图 FIG. 6为示例车辆的方框图。
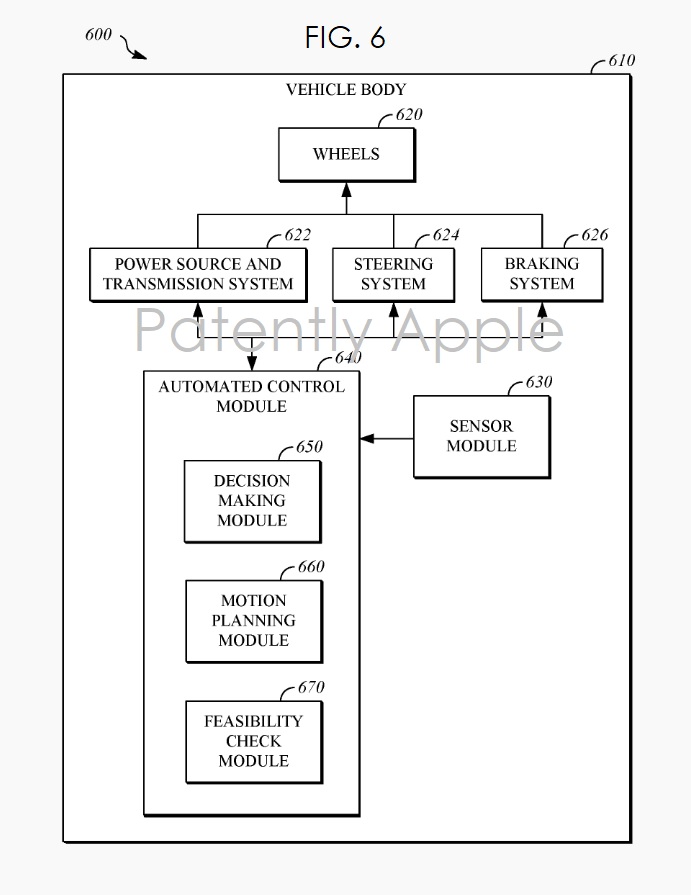
(图片来源:https://www.patentlyapple.com)
如下苹果专利图 FIG. 8为车辆变道操作示例图。

(图片来源:https://www.patentlyapple.com)
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202010/19I70221548LC601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














