盖世汽车讯 激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统,现代3D激光雷达传感器结合了高横向/纵向和径向分辨率,是L4和L5自动驾驶汽车的关键部件。
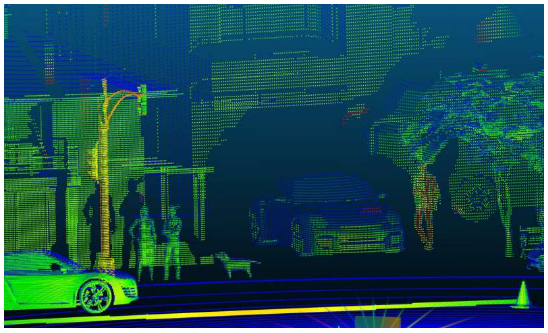
(图片来源:瑞士洛桑联邦理工学院)
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202005/22I70181922LC409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921













